Publications

Publications of specific relevance to the Centre for Advanced Robotics
2026
 TacEva: A Performance Evaluation Framework for Vision‐Based Tactile Sensors Advanced Intelligent Systems
TacEva: A Performance Evaluation Framework for Vision‐Based Tactile Sensors Advanced Intelligent Systems,
Wiley 11-02-2026State of the art in soft eversion robots for colonoscopy: a review Progress in Biomedical Engineering,
Iop Publishing vol. 8 (1)
30-01-2026 2025
Advancing Embodied Intelligence in Robotic-Assisted Endovascular Procedures: A Systematic Review of AI Solutions IEEE Reviews in Biomedical Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 19, 248-266.
16-12-2025 From precision to strength: computer vision for suture quality assessment—an ex vivo pilot studySpagnulo R Marzola F Corso F Distefano G Pescio M Hayashi K Barontini F Dagnino G et al.
Surgical Endoscopy,
Springer Nature, 1-12.
04-12-2025 Flexible Sensor Foil Based on Polymer Optical Waveguide for Haptic AssessmentZhang Z Dawood AB Violakis G Abdalwareth A Flachenecker G Polygerinos P Althoefer K Angelmahr M et al.
Sensors,
Mdpi vol. 25 (22)
12-11-2025 R-Tac0: A Rounded High-Frequency Transferable Monochrome Vision-based Tactile Sensor for Shape ReconstructionLi W Lin P Wang M Xiao C Althoefer K Su Y Jiao Z Liu H
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 10400-10407.
25-10-2025 Tactile Robotics: An Outlook IEEE Transactions on Robotics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 41, 5564-5583.
12-09-2025 Soft robotics: what's next in bioinspired design and applications of soft robots?Laschi C Wen L Iida F Abdulali A Hauser H Wang Y Liu K Ricotti L et al.
Bioinspiration & Biomimetics,
Iop Publishing 12-09-2025 R-FTact: A Rounded High-Frequency Transferable Monochrome Vision-based Tactile Sensor for Shape ReconstructionAlthoefer K Li W
IROS.
01-09-2025 Haptic Stiffness Perception Using Hand Exoskeletons in Tactile Robotic TelemanipulationGiudici G Coppola C Althoefer K Farkhatdinov I Jamone L
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers (IEEE) vol. 10 (10), 9662-9669.
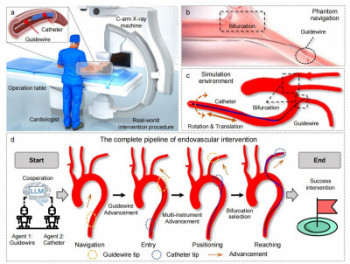
01-08-2025 Multi-Agent Fuzzy Reinforcement Learning with LLM for Cooperative Navigation of Endovascular RoboticsAlthoefer K Yao T Xu Y Wang H Qiu X Qi P
IEEE Transactions on Fuzzy Systems,
Institute of Electrical and Electronics Engineers 14-07-2025 Efficient Manufacturing of Steerable Eversion Robots with Integrated Pneumatic Artificial MusclesMack T Suulker C Dawood AB Althoefer K
Journal of Manufacturing and Materials Processing,
Mdpi vol. 9 (7), 223-223.
01-07-2025 Embedding high-resolution touch across robotic hands enables adaptive human-like graspingZhao Z Li W Li Y Liu T Li B Wang M Du K Liu H et al.
Nature Machine Intelligence,
Springer Nature vol. 7 (6), 889-900.
01-06-2025 Human Emotion-Mediated Soft Robotic Arts: Exploring the Intersection of Human Emotions, Soft Robotics and ArtsNadipineni S Hong C Ramlall T Sirithunge C Althoefer K Iida F Lalitharatne TD
2025 IEEE 8th International Conference on Soft Robotics (RoboSoft). vol. 00, 1-6.
26-04-2025 Fiber Bragg grating-based tactile sensing tool for minimally invasive surgeryZhang Z Violakis G Dawood AB Abdalwareth A Althoefer K Polygerinos P Angelmahr M Schade W
Optical Fibers and Sensors for Medical Diagnostics, Treatment, and Environmental Applications XXV. vol. 13310
20-03-2025 Guest EditorialSpecial Collection on Tactile RoboticsYim M Luo S Lepora N Yuan W Althoefer K Cheng G Dahiya R
IEEE Transactions on Robotics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 41, ii-iii.
01-01-2025 2024
Variable Stiffness & Dynamic Force Sensor for Tissue PalpationDawood AB Zhang Z Angelmahr M Arezzo A Althoefer K
In
Towards Autonomous Robotic Systems,
Springer Nature 296-301.
30-12-2024 Modelling of Buoyancy Based Actuation of an Inflatable Underwater Soft RobotKaleel D Clement B Althoefer K
Towards Autonomous Robotic Systems. vol. 15052, 242-253.
30-12-2024 Variable Stiffness & Dynamic Force Sensor for Tissue PalpationDawood AB Zhang Z Angelmahr M Arezzo A Althoefer K
In
Arxiv 13-12-2024 Leveraging Tactile Sensing to Render both Haptic Feedback and Virtual Reality 3D Object Reconstruction in Robotic TelemanipulationGiudici G Bonzini AA Coppola C Althoefer K Farkhatdinov I Jamone L
In
Arxiv 03-12-2024 Haptic Stiffness Perception Using Hand Exoskeletons in Tactile Robotic TelemanipulationGiudici G Coppola C Althoefer K Farkhatdinov I Jamone L
In
Arxiv 03-12-2024 Editorial: Advanced motion control and navigation of robots in extreme environmentsMontazeri A Shojaei K
Frontiers in Robotics and AI,
Frontiers vol. 11
15-11-2024 Abraded optical fibre-based dynamic range force sensor for tissue palpationDawood AB Chavali VK Mack T Zhang Z Godaba H Angelmahr M Althoefer K
Frontiers in Robotics and AI,
Frontiers vol. 11
11-11-2024 DexSkills: Skill Segmentation Using Haptic Data for Learning Autonomous Long-Horizon Robotic Manipulation TasksMao X Giudici G Coppola C Farkhatdinov I
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 5104-5111.
18-10-2024 Large-scale Deployment of Vision-based Tactile Sensors on Multi-fingered GrippersWang M Li W Liang H Li B Althoefer K Su Y Liu H
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 13946-13952.
18-10-2024 Hybrid Continuum-Eversion Robot: Precise Navigation and Decontamination in Nuclear Environments using Vine RobotAl-Dubooni M Wong C Althoefer K
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 12443-12449.
18-10-2024 Optimal Sensing in Soft Pneumatic Actuators via Stretchable Optical WaveguidesAljaber F Hassan A Vitanov I Almeadadi N AlHajri H AlEnazi S
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 9208-9213.
18-10-2024 Reconfigurable Soft Gripper Based on Eversion and Electroadhesion for Cluttered EnvironmentsRagab D Rendon-Morales E Godaba H
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 9195-9201.
18-10-2024 A structured framework to evaluate capsule endoscope locomotion systemsDinkar DK Shaheed MH Herrington E Althoefer K Thaha MA
Progress in Biomedical Engineering,
Iop Publishing vol. 6 (4), 042003-042003.
01-10-2024 A User Study Method on Healthy Participants for Assessing an Assistive Wearable Robot Utilising EMG SensingSuulker C Greenway A Skach S Farkhatdinov I Miller SC Althoefer K
In
Arxiv 31-07-2024 Let Me Give You a Hand: Enhancing Human Grasp Force With a Soft Robotic Assistive GloveSuulker C Greenway A Skach S Farkhatdinov I Miller SC Althoefer K
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers (IEEE) vol. 9 (9), 7811-7818.
24-07-2024 DexSkills: Skill Segmentation Using Haptic Data for Learning Autonomous Long-Horizon Robotic Manipulation TasksMao X Giudici G Coppola C Althoefer K Farkhatdinov I Li Z Jamone L
In
Arxiv 06-05-2024 Miniaturised Soft Manipulators with Reinforced Actuation Chambers on the Sub-Centimetre ScaleShi J Abad S-A Althoefer K
2024 IEEE 7th International Conference on Soft Robotics (RoboSoft). vol. 00, 157-164.
17-04-2024 Intelligent Shape Decoding of a Soft Optical Waveguide SensorMak C-H Li Y Wang K Wu M Ho JD-L Dou Q Kwok K-W
Advanced Intelligent Systems,
Wiley vol. 6 (2)
01-02-2024 Deformable Tip Mount for Soft Growing Eversion RobotsSuulker C Skach S Kaleel D Abrar T Murtaza Z Suulker D Althoefer K
In
Arxiv 15-01-2024 Hydraulic Volumetric Soft Everting Vine Robot Steering Mechanism for Underwater ExplorationKaleel D Clement B Althoefer K
15th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles CAMS 2024. vol. 58 (20), 59-64.
01-01-2024 2023
The 40th International Conference on Robotics and Automation (ICRA) 2023: Embracing the Future: Making Robots for Humans [Conference Highlights]Althoefer K
IEEE Robotics & Automation Magazine,
Institute of Electrical and Electronics Engineers (IEEE) vol. 30 (4), 105-109.
01-12-2023 QMCube - A Tactile Cube to Explore Hand Interaction Forces in Human ManipulationMurtaza Z Althoefer K
2023 IEEE International Conference on Development and Learning (ICDL). vol. 00, 37-42.
11-11-2023 A Framework to Design and Build a Height Controllable Eversion RobotKaleel D Clement B
2023 11th International Conference on Control, Mechatronics and Automation (ICCMA). vol. 00, 239-244.
03-11-2023 Soft Cap for Vine RobotsSuulker C Skach S Kaleel D Abrar T
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 6462-6468.
05-10-2023 Eversion-Capable Fabric Robot Gripper with Novel Retraction MechanismHassan A Abrar T Aljaber F
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 10232-10237.
05-10-2023 Intelligent Shape Decoding of a Soft Optical Waveguide SensorMak C-H Li Y Wang K Dou Q Sze K-Y
Advanced Intelligent Systems,
Wiley vol. 6 (2)
20-07-2023 Soft Cap for Eversion RobotsSuulker C Skach S Kaleel D Abrar T Murtaza Z Suulker D Althoefer K
In
Arxiv 19-07-2023 Robotic surface exploration with vision and tactile sensing for cracks detection and characterisationPalermo F Omarali B Oh C Althoefer K Farkhatdinov I
In
Arxiv 13-07-2023 Artificial intelligence meets medical roboticsYip M Salcudean S Goldberg K Althoefer K Menciassi A Krieger A Walsh CJ Huang HH
Science,
American Association For The Advancement of Science (Aaas) vol. 381 (6654), 141-146.
13-07-2023 L$^{3}$ F-TOUCH: A Wireless GelSight With Decoupled Tactile and Three-Axis Force SensingLi W Wang M Jha DK Qian X Althoefer K
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers (IEEE) vol. 8 (8), 5148-5155.
05-07-2023 Welcome Page ,
Institute of Electrical and Electronics Engineers (IEEE), 1-1.
04-07-2023 A Miniaturised Camera-based Multi-Modal Tactile SensorAlthoefer K Ling Y Li W Qian X Lee WW
2023 IEEE International Conference on Robotics and Automation (ICRA). vol. 00, 12570-12575.
02-06-2023 Learning Decoupled Multi-touch Force Estimation, Localization and Stretch for Soft Capacitive E-skinDawood AB Coppola C Althoefer K
2023 IEEE International Conference on Robotics and Automation (ICRA). vol. 00, 614-619.
02-06-2023 A fluidic actuator with an internal stiffening structure inspired by mammalian erectile tissueFras J
2023 IEEE International Conference on Robotics and Automation (ICRA). vol. 00, 662-668.
02-06-2023 Integrating Elastic Bands to Enhance Performance for Textile RoboticsSuulker C Skach S Althoefer K
In
Arxiv 28-05-2023 Soft Inflatable Fingers: An Overview of Design, Prototyping and Sensorisation for Various ApplicationsAljaber F Hassan A Althoefer K
2023 IEEE International Conference on Soft Robotics (RoboSoft). vol. 00, 1-6.
07-04-2023 Learning Decoupled Multi-touch Force Estimation, Localization and Stretch for Soft Capacitive E-skinDawood AB Coppola C Althoefer K
In
Arxiv 10-03-2023 Feeling Good: Validation of Bilateral Tactile Telemanipulation for a Dexterous RobotGiudici G Omarali B Bonzini AA Althoefer K Farkhatdinov I
In
Towards Autonomous Robotic Systems,
Springer Nature 443-454.
01-01-2023 2022
A Fabric Soft Robotic Exoskeleton with Novel Elastic Band Integrated Actuators for Hand RehabilitationSuulker C Skach S Althoefer K
In
Arxiv 14-12-2022 Soft Robotic Fabric Actuator With Elastic Bands for High Force and Bending Performance in Hand ExoskeletonsSuulker C Althoefer K
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers (IEEE) vol. 7 (4), 10621-10627.
29-07-2022 Learning to sense three-dimensional shape deformation of a single multimode fiberWang X Wang Y Zhang K Althoefer K Su L
Scientific Reports,
Nature Research 25-07-2022 Performance Evaluation and Optimisation of Multi-point Waveguide based optical Sensor for Soft RobotsHassan A Aljaber F Althoefer K
2022 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS)., 1-4.
10-07-2022 Tactile Classification of Object Materials for Virtual Reality based Robot TeleoperationOmarali B Palermo F Althoefer K
2022 International Conference on Robotics and Automation (ICRA). vol. 00, 9288-9294.
27-05-2022 Soft Robot-Assisted Minimally Invasive Surgery and Interventions: Advances and OutlookKwok K-W Wurdemann H Arezzo A Menciassi A
Proceedings of The IEEE,
Institute of Electrical and Electronics Engineers (IEEE) vol. 110 (7), 871-892.
02-05-2022 Real-Time Pressure Estimation and Localisation with Optical Tomography-inspired Soft Skin SensorsDawood AB Denoun B Althoefer K
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft)., 831-836.
28-04-2022 A Comparison of Silicone and Fabric Inflatable Actuators for Soft Hand ExoskeletonsSuulker C Hassan A Skach S Althoefer K
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft). vol. 00, 735-740.
08-04-2022 An Electro-pneumatic Shape Morphing Rolling Robot with Variable Locomotion ModesLiu C Edwards O Althoefer K Zhang K Godaba H
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft). vol. 00, 715-721.
08-04-2022 The Validation of Viscosity Induced Chord-wise Undulation on Soft Fin Ray Array Towards a Novel Robotic Manta RaySun Y Wu L Wang H Qi P
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft). vol. 00, 673-680.
08-04-2022 Curvature and Contact Sensing with Optical Waveguides for Soft Silicone Pneumatic ActuatorAljaber F Hassan A Vitanov I
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft). vol. 00, 859-864.
08-04-2022 Grasping State and Object Estimation of a Flat Shell Gripper by Strain and Proximity Measurement using a Single Capacitance-Based SensorMatsuno T Miyagoshi R Shimizu K Ishihara M Shintake J
2022 IEEE 5th International Conference on Soft Robotics (RoboSoft). vol. 00, 903-910.
08-04-2022 Magnetic-Field-Inspired Navigation for Robots in Complex and Unknown EnvironmentsAtaka A Lam HK Althoefer K
Frontiers in Robotics and AI,
Frontiers Media vol. 9
18-02-2022 Variable weight algorithm for convolutional neural networks and its applications to classification of seizure phases and typesJia G Althoefer K
Pattern Recognition,
Elsevier vol. 121
01-01-2022 2021
Workspace Scaling and Rate Mode Control for Virtual Reality based Robot TeleoperationOmarali B Althoefer K Mastrogiovanni F Valle M
2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC). vol. 00, 607-612.
20-10-2021 A Suite of Robotic Solutions for Nuclear Waste DecommissioningVitanov I Farkhatdinov I Denoun B Palermo F Otaran A Brown J Omarali B Abrar T et al.
Robotics vol. 10 (4), 112-112.
07-10-2021 Multi-modal robotic visual-tactile localisation and detection of surface cracksPalermo F Rincon-Ardila L Oh C Althoefer K Poslad S Venture G Farkhatdinov I
2021 IEEE 17th International Conference on Automation Science and Engineering.
05-10-2021 Large‐Scale Surface Shape Sensing with Learning‐Based Computational MechanicsWang K Mak C Ho JDL Liu Z Wong KKY Liu Y
Advanced Intelligent Systems,
Wiley vol. 3 (11)
30-08-2021 Using RoboChick to Identify the Behavioral Features Promoting Social InteractionsSlonina Z Bonzini AA Brown J Wang S Farkhatdinov I Althoefer K Jamone L Versace E
2021 IEEE International Conference on Development and Learning (ICDL).
23-08-2021 Fusing dexterity and perception for soft robot-assisted minimally invasive surgery: What we learnt from stiff-flopDawood AB Fras J Aljaber F Mintz Y Arezzo A Godaba H Althoefer K
Applied Sciences,
Mdpi vol. 11 (14)
17-07-2021 Dynamic characterization of a master–slave robotic manipulator using a hybrid grey wolf–whale optimization algorithmObadina OO Thaha MA Althoefer K Shaheed MH
Journal of Vibration and Control,
Sage Publications, 107754632110034-107754632110034.
27-03-2021 Robotics Responds to the COVID-19 OutbreakMarques L Murphy R Althoefer K Tadokoro S
IEEE Robotics & Automation Magazine,
Institute of Electrical and Electronics Engineers (IEEE) vol. 28 (1), 16-17.
01-03-2021 Observer-based Control of Inflatable Robot with Variable Stiffness *Ataka A Abrar T Godaba H
2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 8646-8652.
24-01-2021 Innovation in the time of SARS-CoV-2: A collaborative journey between NHS clinicians, engineers, academics and industryDin AR Althoefer K Farkhatdinov I Brown J Morgan C Shahdad S
The Surgeon,
Elsevier vol. 19 (5), e281-e288.
22-01-2021 Attribution of autonomy and its role in robotic language acquisitionFörster F
AI & Society,
Springer Nature vol. 37 (2), 605-617.
16-01-2021 Stiffness Control of Variable Stiffness Link Using a Conductive Fabric Based Proximity SensorIshihara M Matsuno T Althoefer K
2021 IEEE/SICE International Symposium on System Integration (SII). vol. 00, 87-92.
14-01-2021 Virtual Reality Percussion Simulator for Medical Student TrainingBálint LAP Althoefer K
2021 IEEE 6th International Forum on Research and Technology for Society and Industry (RTSI). vol. 00, 295-299.
09-01-2021 Soft Multi-point Waveguide Sensor for Proprioception and Extereoception in Inflatable FingersHassan A Aljaber F Godaba H Vitanov I
2021 IEEE 6th International Forum on Research and Technology for Society and Industry (RTSI). vol. 00, 574-579.
09-01-2021 Chapter 27 Soft Robotics Solutions for Minimally Invasive Surgery: The Need for Stiffness ControllabilityFras J Arezzo A Shiva A
In
Soft Matter For Biomedical Applications,
Royal Society of Chemistry (Rsc) 684-719.
01-01-2021 2020
Automatic Fracture Characterization Using Tactile and Proximity Optical SensingPalermo F Konstantinova J Althoefer K
Frontiers in Robotics and AI,
Frontiers Media 02-12-2020 F-TOUCH Sensor for Three-Axis Forces Measurement and Geometry ObservationLi W Noh Y Alomainy A Vitanov I Zheng Y Qi P Althoefer K
2020 IEEE SENSORS. vol. 00, 1-4.
28-10-2020 Silicone-based Capacitive E-skin for Exteroception and
ProprioceptionDawood AB Godaba H Ataka A Althoefer K
International Conference on Intelligent Robots and Systems (IROS) Las Vegas, NV, USA (Virtual) 25 Oct 2020 - 29 Oct 2020.
25-10-2020 A two-fingered robot gripper with variable stiffness flexure hinges based on shape morphingGodaba H Sajad A Patel N Althoefer K Zhang K
2020 IEEE International Conference on Intelligent Robots and Systems., 8716-8721.
24-10-2020 Attention Enhancement and Motion Assistance for Virtual Reality-Mediated Upper-Limb RehabilitationLi M Guo W Xu J Wu D Liang Z Yuan H Xie J
IEEE Transactions on Medical Robotics and Bionics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 2 (4), 565-568.
14-10-2020 An In-Homogeneous Structured Eversion ActuatorPutzu F ABRAR T Godaba H Rizqi A
Towards Autonomous Robotic Systems Conference (TAROS) Online 16 Sep 2020.
16-09-2020 A bending sensor insensitive to pressure: soft proprioception based on abraded optical fibresGodaba H Vitanov I Ataka A
2020 3rd IEEE International Conference on Soft Robotics (RoboSoft). vol. 00, 104-109.
15-07-2020 Plant Bioinspired Ecological RoboticsFrazier PA Jamone L Althoefer K
Frontiers in Robotics and AI,
Frontiers Media vol. 7
14-07-2020 Criminisi Algorithm Applied to a GelSight Fingertip Sensor for Multi-modality PerceptionLi X Li W Althoefer K Qi P
2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). vol. 00, 190-195.
09-07-2020 Instant soft robot: A simple recipe for quick and easy manufacturingFras J Althoefer K Glowka J
IEEE International Conference on Soft Robotics RoboSoft 2020 Online 15 May 2020 - 15 Jun 2020.
15-05-2020 Model-based Pose Control of Inflatable Eversion Robot with Variable StiffnessAtaka A Abrar T Putzu F
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers (IEEE), 1-1.
26-02-2020 Stiffness Imaging with a Continuum Appendage: Real-Time Shape and Tip Force Estimation from Base Load ReadingsSadati SMH Shiva A Herzig N Rucker CD Hauser H Walker ID Bergeles C Althoefer K et al.
IEEE Robotics and Automation Letters vol. 5 (2), 2824-2831.
10-02-2020 TMTDyn: A Matlab Package for Modeling and Control of Hybrid Rigid-Continuum Robots Based on Discretized Lumped System and Reduced-Order ModelsAlthoefer K
International Journal of Robotics Research,
Sage Publications 06-01-2020 Virtual Reality based Telerobotics Framework with Depth CamerasOmarali B Denoun B Althoefer K Jamone L
2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). vol. 00, 1217-1222.
04-01-2020 Correction to: Stiffness Control of Soft Robotic Manipulator for Minimally Invasive Surgery (MIS) Using Scale JammingSadati SMH Noh Y Elnaz Naghibi S
In
Intelligent Robotics and Applications,
Springer Nature c1-c1.
01-01-2020 F-TOUCH Sensor: Concurrent Geometry Perception and Multi-axis Force MeasurementLi W Alomainy A Vitanov I Noh Y Qi P Althoefer K
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE), 1-1.
01-01-2020 An Inhomogeneous Structured Eversion ActuatorAbrar T Hassan A Putzu F Godaba H
In
Towards Autonomous Robotic Systems,
Springer Nature 37-48.
01-01-2020 Silicone Based Capacitive E-Skin Sensor for Soft Surgical RobotsDawood AB Godaba H Althoefer K
In
Towards Autonomous Robotic Systems,
Springer Nature 62-65.
01-01-2020 Shape Reconstruction of Soft-Body Manipulator: A Learning-Based ApproachVitanov I Rizqi A
In
Towards Autonomous Robotic Systems,
Springer Nature 58-61.
01-01-2020 Instant soft robot: A simple recipe for quick and easy manufacturingFras J Glowka J Althoefer K
2020 3RD IEEE INTERNATIONAL CONFERENCE ON SOFT ROBOTICS (ROBOSOFT)., 476-482.
01-01-2020 2019
Payload capabilities and operational limits of eversion robotsGodaba H Putzu F Abrar T Althoefer K
Annual Conference Towards Autonomous Robotic Systems. vol. 11650 LNAI, 383-394.
17-07-2019 Robotic-assisted ultrasound for fetal imaging: Evolution from single-arm to dual-arm systemWang S Housden J Noh Y Singh D Singh A Skelton E Matthew J Tan C et al.
Towards Autonomous Robotic Systems Conference (TAROS). vol. 11650 LNAI, 27-38.
17-07-2019 Modelling of a soft sensor for exteroception and proprioception in a pneumatically actuated soft robotDawood AB Godaba H Althoefer K
Annual Conference Towards Autonomous Robotic Systems. vol. 11650 LNAI, 99-110.
17-07-2019 Designing Origami-Adapted Deployable Modules for Soft Continuum ArmsZhang K Althoefer K
20th Towards Autonomous Robotic Systems (TAROS 2019) London 3 Jul 2019 - 5 Jul 2019. vol. 11649 LNAI, 138-147.
07-07-2019 Soft particles for granular jammingPutzu F Konstantinova J
Towards Autonomus Robotics Systems (TAROS) 5 Jul 2019 - 3 Jul 2020. vol. 11650 LNAI, 65-74.
03-07-2019 Mobile robot trajectory analysis with the help of vision systemDanabek D Otaran A Althoefer K
Towards Autonomous Robotic Systems Conference (TAROS). vol. 11650 LNAI, 273-279.
03-07-2019 Design Analysis of a Fabric Based Lightweight Robotic GripperHassan A Godaba H
Annual Conference Towards Autonomous Robotic Systems. vol. 11649 LNAI, 16-27.
28-06-2019 Dynamic Response Characteristics in Variable Stiffness Soft Inflatable LinksAli A Althoefer K Konstantinova J
Towards Autonomous Robotic Systems Conference. vol. 11649 LNAI, 160-170.
28-06-2019 Soft Fiber-Reinforced Pneumatic Actuator Design and Fabrication: Towards Robust, Soft Robotic SystemsFras J
Annual Conference Towards Autonomous Robotic Systems. vol. 11649 LNAI, 103-114.
28-06-2019 Kinematic Control and Obstacle Avoidance for Soft Inflatable ManipulatorAtaka A Stilli A Konstantinova J Wurdemann HA
Annual Conference Towards Autonomous Robotic Systems. vol. 11649 LNAI, 52-64.
28-06-2019 Virtual Reality Simulator for Medical Auscultation TrainingBálint LAP Macías LHP
Towards Autonomous Robotic Systems Conference. vol. 11649 LNAI, 386-398.
28-06-2019 Light Intensity-Modulated Bending Sensor Fabrication and Performance Test for Shape SensingAljaber F
TAROS. vol. 11649 LNAI, 126-137.
28-06-2019 Eversion-type soft overtube for endoscopic surgeryPutzu F Konstantinova J Althoefer K
The Hamlyn Symposium on Medical Robotics., 7-8.
23-06-2019 Reduced Order vs. Discretized Lumped System Models with Absolute and Relative States for Continuum ManipulatorsSadati S Shiva A Elnaz Naghibi S Renson L Althoefer K Nanayakkara T Walker I
Robotics: Science and Systems XV.
22-06-2019 An Attention-Controlled Hand Exoskeleton for the Rehabilitation of Finger Extension and Flexion Using a Rigid-Soft Combined Mechanism.Li M He B Liang Z Zhao C-G Chen J Zhuo Y Xie J
Front Neurorobot vol. 13, 34-34.
29-05-2019 EPAM: Eversive pneumatic artificial muscleAbrar T Putzu F Konstantinova J Althoefer K
Robosoft 2019 2019 IEEE International Conference on Soft Robotics., 19-24.
24-05-2019 An elastomer-based flexible optical force and tactile sensorLi W Konstantinova J Noh Y Ma Z Alomainy A Althoefer K
Robosoft 2019 2019 IEEE International Conference on Soft Robotics., 361-366.
24-05-2019 Magnetic-Field-Inspired Navigation for Quadcopter Robot in Unknown EnvironmentsAtaka A Lam HK
2019 International Conference on Robotics and Automation (ICRA). vol. 00, 6165-6171.
24-05-2019 Real-time robot-assisted ergonomicsShafti A Ataka A Lazpita BU Althoefer K
International Conference on Robotics and Automation (ICRA). vol. 2019-May, 1975-1981.
20-05-2019 Analysis of a customized clutch joint designed for the safety management of an ultrasound robotWang S Housden RJ Noh Y Singh A Lindenroth L Liu H Hajnal J
Applied Sciences (Switzerland) vol. 9 (9)
09-05-2019 Elastomer-based touch sensor: Visualization of tactile pressure distributionLi W Konstantinova J Alomainy A Althoefer K
Towards Autonomous Robotic Systems (TAROS). vol. 11650 LNAI, 87-98.
26-04-2019 Elasticity Versus Hyperelasticity Considerations in Quasistatic Modeling of a Soft Finger-Like Robotic Appendage for Real-Time Position and Force Estimation.Shiva A Sadati SMH Noh Y Fraś J Ataka A Würdemann H Hauser H Walker ID et al.
Soft Robot vol. 6 (2), 228-249.
01-04-2019 Adaptive update of reference capacitances in conductive fabric based robotic skinMatsuno T Wang Z Althoefer K
IEEE Robotics and Automation Letters vol. 4 (2), 2212-2219.
27-02-2019 Soft biomimetic prosthetic hand:
Design, manufacturing and preliminary examinationFRAS J ALTHOEFER K
International Conference on Intelligent Robots.
07-01-2019 Design and Implementation of a Bespoke Robotic Manipulator for Extra-corporeal Ultrasound.Wang S Housden J Noh Y Singh A Lindenroth L Liu H Hajnal J
J Vis Exp (143)
07-01-2019 Magnetic-field-inspired Navigation for Soft Continuum ManipulatorAtaka A Shiva A
IEEE/RSJ International Conference on Intelligent Robots and Systems 2018 Madrid, Spain 1 Oct 2018 - 5 Oct 2018.
07-01-2019 PrefaceAlthoefer K Konstantinova J Zhang K
01-01-2019 2018
Static Kinematics for an Antagonistically Actuated Robot Based on a Beam-Mechanics-Based ModelStilli A Kolokotronis E Fras J Wurdemann HA
International Conference on Intelligent Robots and Systems (IROS)., 6959-6964.
27-12-2018 Modelling the Structure of Object-Independent Human Affordances of Approaching to Grasp for Robotic HandsCOTUGNO G KONSTANTINOVA J ALTHOEFER KA
Plos One,
Public Library of Science (Plos) 26-12-2018 A Modified Computed Torque Control Approach for a Teleoperation Master- Slave Robot Manipulator SystemObadina O Bernth J
UK-RAS Conference: Robots Working For and Among Us Proceedings. vol. 1, 29-31.
12-10-2018 Silicone-based ultra-stretchable strain sensorsPutzu F Althoefer K
UK-RAS Conference: Robots Working For and Among Us Proceedings. vol. 1, 144-147.
12-10-2018 Bio-mimetic pneumatic soft prosthetic handFras J
UK-RAS Conference: Robots Working For and Among Us Proceedings. vol. 1, 90-92.
12-10-2018 Localised Online Learning-Based Control of a Soft Redundant Manipulator Under Variable LoadingALTHOEFER KA
Advanced Robotics,
Taylor & Francis 05-10-2018 Magnetic-Field-Inspired Navigation for Soft Continuum Manipulator* *This work was supported in part by King's College London, the EPSRC in the framework of the NCNR (National Centre for Nuclear Robotics) project (EP/R02572X/1), the STIFF-FLOP project grant from the European Communities Seventh Framework Programme under grant agreement 287728, and the Indonesia Endowment Fund for Education, Ministry of Finance Republic of Indonesia.Ataka A Shiva A Lam HK
2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). vol. 00, 168-173.
01-10-2018 Medical Virtual Reality Palpation Training using Ultrasound Based Haptics and Image ProcessingPuertolas Balint L
CRAS 2018 London.
10-09-2018 Plant-Inspired Soft Pneumatic Eversion RobotPUTZU F ABRAR T
BioRob 2018 Enschede, Netherlands 26 Aug 2018 - 29 Aug 2018.
29-08-2018 Medical Virtual Reality Palpation Training using Ultrasound Based Haptics and Image ProcessingPuertolas Balint L Althoefer K
CRAS.
11-08-2018 Soft Pneumatic Prosthetic HandFRAS J
TAROS.
21-07-2018 A Modified Computed Torque Control Approach for a Master-Slave Robot Manipulator SystemOBADINA OO THAHA MA ALTHOEFER K SHAHEED MH
Lecture Notes in Computer Science,
Springer Verlag, 28-39.
21-07-2018 Hypertonic saline solution for signal transmission and steering in MRI-guided intravascular catheterisationCaenazzo A Althoefer K
TAROS. vol. 10965 LNAI, 284-290.
21-07-2018 Camera-based force and tactile sensorLi W Konstantinova J Noh Y Alomainy A Althoefer K
TAROS. vol. 10965 LNAI, 438-450.
21-07-2018 Reactive Magnetic-Field-Inspired Navigation Method for Robots in Unknown Convex 3-D EnvironmentsALTHOEFER KA
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers 09-07-2018 iCLAP: Shape Recognition by Combining Proprioception and Touch SensingALTHOEFER KA
Autonomous Robots,
Springer Verlag 23-06-2018 Reactive Magnetic-Field-Inspired Navigation for Non-Holonomic Mobile Robots in Unknown Environments**This work was supported in part by King's College London, the EPSRC in the framework of the NCNR (National Centre for Nuclear Robotics) project (EP/R02572X/1), and the Indonesia Endowment Fund for Education, Ministry of Finance Republic of Indonesia.Ataka A Lam H-K Althoefer K
2018 IEEE International Conference on Robotics and Automation (ICRA). vol. 00, 6983-6988.
21-05-2018 Bio-inspired octopus robot based on novel soft fluidic actuatorFRAS J Noh Y Wurdemann H
IEEE International Conference on Robotics and Automation (ICRA).
20-05-2018 Real-Time Vision-Based Stiffness MappingALTHOEFER KA
Sensors,
Mdpi Ag 26-04-2018 AirExGlove – A Novel Pneumatic Exoskeleton Glove for Adaptive Hand Rehabilitation in Post-Stroke PatientsALTHOEFER KA
International Conference on Soft Robotics.
24-04-2018 Fluidical bending actuator designed for soft octopus robot tentacleFRAS J Macias M Noh Y
2018 IEEE International Conference on Soft Robotics (RoboSoft).
23-04-2018 Antagonistic actuation and stiffness control in soft inflatable robotsALTHOEFER KA
Nature Reviews Materials 20-04-2018 Toward a Low Hysteresis Helical Scale Jamming Interface Inspired by Teleost Fish Scale Morphology and ArrangementSadati SMH Naghibi SE Althoefer K
2018 IEEE International Conference on Soft Robotics (RoboSoft)., 455-460.
01-04-2018 Development of an Adaptable, Soft Robot with an Aortic Diameter Sensor to Modulate Blood Flow in an Extreme Biological EnvironmentMehta A Mehta A Velazquez-Pimentel D
2018 IEEE International Conference on Soft Robotics (RoboSoft)., 344-349.
01-04-2018 Towards Creating a Flexible Shape Senor for Soft RobotsALJaber F
2018 IEEE International Conference on Soft Robotics (RoboSoft)., 114-119.
01-04-2018 Three-Dimensional-Printable Thermoactive Helical Interface With Decentralized Morphological Stiffness Control for Continuum ManipulatorsSadati SMH Sullivan L Walker ID
IEEE Robotics and Automation Letters vol. 3 (3), 2283-2290.
12-02-2018 Soft Robotics. Bio-inspired Antagonistic StiffeningStilli A Althoefer K Wurdemann HA
In
Developing Support Technologies,
Springer Nature 207-214.
01-01-2018 Magnetic-field-inspired Navigation for Soft Continuum ManipulatorAtaka A Shiva A Lam HK
2018 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS (IROS)., 8061-8066.
01-01-2018 Soft and Stiffness-controllable Robotics Solutions for Minimally Invasive Surgery:Konstantinova J Wurdemann H Shafti A
1-420.
01-01-2018 2017
Nonparametric Online Learning Control for Soft Continuum Robot: An Enabling Technique for Effective Endoscopic NavigationLee KH Fu DKC Leong MCW Chow M Fu HC Althoefer K Sze KY
Soft Robotics vol. 4 (4), 324-337.
01-12-2017 Object Classification Using Hybrid Fiber Optical Force/Proximity SensorKonstantinova J Stilli A Noh Y Althoefer K IEEE
IEEE Sensors Conference 29 Oct 2017 - 1 Nov 2017., 543-545.
01-11-2017 Object Classification Using Hybrid Fiber Optical Force/Proximity SensorKONSTANTINOVA J Cotugno G Stilli A
IEEE Sensors Conference Glasgow 29 Oct 2017 - 1 Nov 2017.
29-10-2017 Fingertip Fiber Optical Tactile Array with Two-Level Spring StructureKONSTANTINOVA J Stilli
Sensors,
Mdpi vol. 17 (10)
13-10-2017 Anchoring like octopus: biologically inspired soft artificial suckerSareh S Althoefer K Li M Noh Y Tramacere F Sareh P
Journal of The Royal Society Interface,
The Royal Society vol. 14 (135)
01-10-2017 Soft fluidic rotary actuator with improved actuation propertiesALTHOEFER KA fras J Wurdemann H
2017 IEEE/RSJ International Conference on Intelligent Robots and Systems.
24-09-2017 Control Space Reduction and Real-Time Accurate Modeling of Continuum Manipulators Using Ritz and Ritz–Galerkin MethodsSadati SMH Naghibi SE Walker ID Althoefer K
IEEE Robotics and Automation Letters vol. 3 (1), 328-335.
22-08-2017 Variable Stiffness Link (VSL): Toward inherently safe robotic manipulatorsStilli A Grattarola L Wurdemann HA
IEEE International Conference on Robotics and Automation., 4971-4976.
21-07-2017 Autonomous Object Handover using Wrist Tactile InformationKONSTANTINOVA J Krivic S Stilli A
18th Towards Autonomous Robotic Systems (TAROS) Conference Surrey, United Kingdom 19 Jul 2017 - 21 Jul 2017.
19-07-2017 A geometry deformation model for braided continuum manipulatorsSadati SMH Naghibi SE Shiva A Noh Y Gupta A
Frontiers Robotics AI vol. 4 (JUN)
30-06-2017 Toward a Low-Cost Soft Robotic Manipulator based on Fluid-Actuated Bellows for Gastric Cancer ScreeningGarbin N Stilli A Shiva A Fras J Slawinski PR Obstein KL Althoefer K
10th Hamlyn Symposium on Medical Robotics 2017., 53-54.
25-06-2017 Canceling strong and complex interference in NQR-based landmine detectionShao W Kosmas P Althoefer K
International Conference on Information and Automation for Sustainability: Interoperable Sustainable Smart Systems for Next Generation, ICIAfS 2016.
12-06-2017 Probe tracking and its application in automatic acquisition using a trans-esophageal ultrasound robotWang S Singh D Lau D Reddy K Althoefer K
Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) vol. 10170 LNCS, 14-23.
13-04-2017 Wearable haptic based pattern feedback sleeve systemRanasinghe A Althoefer K Dasgupta P Nanayakkara T
Advances in Intelligent Systems and Computing vol. 547, 302-312.
13-04-2017 Detecting NQR signals severely polluted by interferenceShao W Barras J
Signal Processing vol. 138, 256-264.
31-03-2017 Knock-Knock: Acoustic object recognition by using stacked denoising autoencodersLuo S Althoefer K Liu H
Neurocomputing 11-03-2017 A Novel Concept for Safe, Stiffness-Controllable Robot LinksStilli A Wurdemann HA
Soft Robotics vol. 4 (1), 16-22.
01-03-2017 Evaluation of stiffness feedback for hard nodule identification on a phantom silicone modelLi M KONSTANTINOVA J Xu G He B Xie J Wurdemann H
Plos One,
Public Library of Science (Plos) 01-03-2017 Ex vivo study of prostate cancer localization using rolling mechanical imaging towards minimally invasive surgery.Li J Liu H Brown M Kumar P Challacombe BJ Chandra A Seneviratne LD Althoefer K
Med Eng Phys 21-02-2017 Palpation Force Modulation Strategies to Identify Hard Regions in Soft Tissue OrgansKONSTANTINOVA J Cotugno G Dasgupta P
Plos One,
Public Library of Science (Plos) 15-02-2017 Mechanics of continuum manipulators, a comparative study of five methods with experimentsSadati SM Naghibi SE Shiva A Walker ID Althoefer K
Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics) vol. 10454 LNAI, 686-702.
01-01-2017 Low Cost Soft Endoscope Robotic ProbeStopforth R Davrajh S
2017 IEEE AFRICON., 1414-1419.
01-01-2017 2016
Real-Time Pose Estimation and Obstacle Avoidance for Multi-segment Continuum Manipulator in Dynamic EnvironmentsALTHOEFER KA Ataka A Qi P Shiva A Shafti A
IEEE/RSJ International Conference on Intelligent Robots and Systems.
01-12-2016 Embroidered Electromyography: A Systematic Design GuideALTHOEFER KA Shafti A Ribas Manero RB
IEEE Transactions on Neural Systems and Rehabilitation Engineering 01-12-2016 A new miniaturised multi-axis force/torque sensors based on optoelectronic technology and simply-supported beamNoh Y Bimbo J Stilli A Wurdemann H Liu H Housden J
International Conference on Intelligent Robots and Systems. vol. 2016-November, 202-207.
28-11-2016 Fingertip proximity sensor with realtime visual-based calibrationKonstantinova J Stilli A Faragasso A
IROS 2016. vol. 2016-November, 170-175.
28-11-2016 Stiffness-based modelling of a hydraulically-actuated soft robotics manipulatorLindenroth L Back J Schoisengeier A Noh Y
IEEE International Conference on Intelligent Robots and Systems. vol. 2016-November, 2458-2463.
28-11-2016 Iterative Closest Labeled Point for tactile object shape recognitionLuo S Mou W Althoefer K
IEEE International Conference on Intelligent Robots and Systems. vol. 2016-November, 3137-3142.
28-11-2016 New kinematic multi-section model for catheter contact force estimation and steeringBack J Lindenroth L Karim R Althoefer K
IEEE International Conference on Intelligent Robots and Systems. vol. 2016-November, 2122-2127.
28-11-2016 Multi-axis force/torque sensor based on simply supported beam and optoelectronicsALTHOEFER KA Noh Y Bimbo J Sareh S Sures Chathuranga D Liu H
Journal of Sensors Mdpi 17-11-2016 Robotic Ultrasound: View Planning, Tracking, and Automatic Acquisition of Trans-esophageal EchocardiographyALTHOEFER KA
Ieeerobotics&Automationmagazine 07-11-2016 FourByThree: Imagine humans and robots working hand in handMaurtua I Pedrocchi N Orlandini A Fernandez JDG Vogel C Geenen A
IEEE International Conference on Emerging Technologies and Factory Automation, ETFA. vol. 2016-November
03-11-2016 Three-Degree-of-Freedom MR-Compatible Multisegment Cardiac Catheter Steering Mechanism.Ataollahi A Karim R Fallah AS Rhode K Razavi R Althoefer K
IEEE Trans Biomed Eng vol. 63 (11), 2425-2435.
01-11-2016 Low Cost Robotic Endoscope Design ConsiderationsStopforth R Davrajh S
2016 Pattern Recognition Association of South Africa and Robotics and Mechatronics International Conference (PRASA-RobMech)., 1-6.
01-11-2016 Analysis of comfort and ergonomics for clinical work environmentsShafti A Lazpita BU Elhage O Wurdemann HA Althoefer K
Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society EMBS. vol. 2016-October, 1894-1897.
13-10-2016 Image-Based Optical Miniaturized Three-Axis Force Sensor for Cardiac CatheterizationNoh Y Liu H Sareh S Chathuranga DS Rhode K
IEEE Sensors Journal vol. 16 (22), 7924-7932.
16-08-2016 A compact continuum manipulator system with enhanced steering abilities for robot-Assisted surgeryQi P Zhang C Li J Li Z Dai JS
BioRob 2016. vol. 2016-July, 49-54.
26-07-2016 Design of a flexible force-sensing platform for medical ultrasound probesSchoisengeier A Lindenroth L Back J Qiu C Noh Y Althoefer K
BioRob 2016. vol. 2016-July, 278-283.
26-07-2016 Autonomous robotic palpation of soft tissue using the modulation of applied forceKonstantinova J Cotugno G Althoefer K
BioRob2016. vol. 2016-July, 323-328.
26-07-2016 Towards safer obstacle avoidance for continuum-style manipulator in dynamic environmentsAtaka A Qi P Shiva A Shafti A Wurdemann H Dasgupta P
BioRob 2016. vol. 2016-July, 600-605.
26-07-2016 Tendon-Based Stiffening for a Pneumatically Actuated Soft ManipulatorShiva A Stilli A Noh Y Faragasso A Falco ID Gerboni G Cianchetti M
IEEE Robotics and Automation Letters vol. 1 (2), 632-637.
01-07-2016 Evaluation of Pseudo-Haptic Interactions with Soft Objects in Virtual EnvironmentsLi M Sareh S Xu G Ridzuan MB Luo S
Plos One,
Public Library of Science vol. 11 (6), e0157681-e0157681.
28-06-2016 Total mesorectal excision using a soft and flexible robotic arm: a feasibility study in cadaver modelsArezzo A Mintz Y Allaix ME Arolfo S Bonino M Gerboni G Brancadoro M Cianchetti M et al.
Surgical Endoscopy: Surgical and Interventional Techniques,
Springer Verlag (Germany) 23-06-2016 Designing embroidered electrodes for wearable surface electromyographyShafti A Manero RBR Borg AM Althoefer K
IEEE International Conference on Robotics and Automation. vol. 2016-June, 172-177.
08-06-2016 Real-time planner for multi-segment continuum manipulator in dynamic environmentsAtaka A Qi P Althoefer K
IEEE International Conference on Robotics and Automation. vol. 2016-June, 4080-4085.
08-06-2016 A geometry deformation model for compound continuum manipulators with external loadingSadati SMH Shiva A Ataka A Naghibi SE Walker ID
IEEE International Conference on Robotics and Automation. vol. 2016-June, 4957-4962.
08-06-2016 A Novel Continuum Manipulator Design Using Serially Connected Double-Layer Planar SpringsQi P Qiu C Liu H Dai JS Seneviratne LD
IEEE/Asme Transactions on Mechatronics vol. 21 (3), 1281-1292.
01-06-2016 Stable Grip Control on Soft Objects With Time-Varying StiffnessNanayakkara T Jiang A Del Rocío Armas Fernández M Liu H Althoefer K
IEEE Transactions on Robotics vol. 32 (3), 626-637.
01-06-2016 Authentication of Medicines Using Nuclear Quadrupole Resonance Spectroscopy.Chen C Zhang F Barras J Althoefer K Mandal S
IEEE/Acm Trans Comput Biol Bioinform vol. 13 (3), 417-430.
01-05-2016 Kinematic Control of Continuum Manipulators Using a Fuzzy-Model-Based ApproachQi P Liu C Ataka A
IEEE Transactions on Industrial Electronics vol. 63 (8), 5022-5035.
14-04-2016 The Role of the Thumb: Study of Finger Motion in Grasping and Reachability Space in Human and Robotic HandsCotugno G Althoefer K
IEEE Transactions on Systems, Man, and Cybernetics: Systems vol. 47 (7), 1061-1070.
05-04-2016 Six-Dimensional Compliance Analysis and Validation of Orthoplanar SpringsQiu C Qi P Liu H
Journal of Mechanical Design, Transactions of The Asme vol. 138 (4)
01-04-2016 Robot Competitions: What Did We Learn? [Competitions]Dias J Althoefer K
IEEE Robotics & Automation Magazine,
Institute of Electrical and Electronics Engineers (IEEE) vol. 23 (1), 16-18.
04-03-2016 Three-Axis Fiber-Optic Body Force Sensor for Flexible ManipulatorsNoh Y Sareh S Wurdemann H Liu H Housden J
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 16 (6), 1641-1651.
08-02-2016 Salient Feature of Haptic-Based Guidance of People in Low Visibility Environments Using Hard ReinsRanasinghe A Sornkarn N Dasgupta P Penders J
IEEE Transactions on Cybernetics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 46 (2), 568-579.
13-01-2016 In-Hand Object Pose Estimation Using Covariance-Based Tactile To Geometry MatchingBimbo J Luo S Liu H
IEEE Robotics and Automation Letters,
Institute of Electrical and Electronics Engineers (IEEE) vol. 1 (1), 570-577.
01-01-2016 Reactive motion planning for mobile continuum arm in dynamic industrial environmentAtaka A Shiva A Wurdemann H
Advances in Cooperative Robotics Proceedings of the 19th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines Clawar 2016., 178-185.
01-01-2016 Wearable Embroidered Muscle Activity Sensing Device for the Human Upper LegManero RBR Shafti A Michael B Grewal J Ribas Fernandez JL Althoefer K Howard MJ
2016 38TH ANNUAL INTERNATIONAL CONFERENCE OF THE IEEE ENGINEERING IN MEDICINE AND BIOLOGY SOCIETY (EMBC)., 6062-6065.
01-01-2016 2015
Soft and stretchable sensor using biocompatible electrodes and liquid for medical applicationsRusso S Ranzani T Nefti-Meziani S Althoefer K
Soft Robotics vol. 2 (4), 146-154.
01-12-2015 Lagrangian Dynamics and Nonlinear Control of a Continuum ManipulatorYu Y Qi P Althoefer K
2015 IEEE International Conference on Robotics and Biomimetics (ROBIO)., 1912-1917.
01-12-2015 Macrobend optical sensing for pose measurement in soft robot armsSareh S Noh Y Li M Ranzani T Liu H
Smart Materials and Structures,
Iop Publishing vol. 24 (12)
06-11-2015 Off-resonance effects in 14N NQR signals from the pulsed spin-locking (PSL) and three-pulse echo sequence; a study for monoclinic TNTSmith JAS Rowe MD Peirson NF
Solid State Nuclear Magnetic Resonance,
Elsevier vol. 71, 41-54.
01-10-2015 A Neural Network Clamping Force Model for Bolt Tightening of Wind Turbine HubsSecco EL Nagar A Deters C Lam H-K
2015 IEEE International Conference on Computer and Information Technology; Ubiquitous Computing and Communications; Dependable, Autonomic and Secure Computing; Pervasive Intelligence and Computing., 288-296.
01-10-2015 14N NQR, relaxation and molecular dynamics of the explosive TNTSmith JAS Rowe MD Althoefer K Peirson NF
Solid State Nuclear Magnetic Resonance,
Elsevier vol. 71, 61-66.
28-09-2015 Multi-Axis Stiffness Sensing Device for Medical PalpationFaragasso A Stilli A Bimbo J Wurdemann HA
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)., 2711-2716.
01-09-2015 Design, Kinematics and Prototype of a Flexible Robot Arm With Planar SpringsQi P Liu H Seneviratne L
Volume 5A: 39th Mechanisms and Robotics Conference., v05at08a033-v05at08a033.
02-08-2015 Kinematic Analysis of a Mechanism With Dual Remote Centre of Motion and its Potential ApplicationBai G Qi P Althoefer K Dai JS
Volume 5B: 39th Mechanisms and Robotics Conference., v05bt08a011-v05bt08a011.
02-08-2015 Embedded electro-conductive yarn for shape sensing of soft robotic manipulatorsWurdemann HA Sareh S Shafti A Noh Y Chathuranga DS Liu H
2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). vol. 2015, 8026-8029.
01-08-2015 Comfort and Learnability Assessment of a New Soft Robotic Manipulator for Minimally Invasive Surgery* *The authors would like to thank Guy's Hospital administration and staff for support during the course of these experiments. The work described in this paper is funded by the Seventh Framework Programme of the European Commission under grant agreement 287728 in the framework of EU project STIFF-FLOP.Shafti A Andorno F Marchese N Arolfo S Elhage O Noh Y Wurdemann HA Arezzo A
2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). vol. 2015, 4861-4864.
01-08-2015 An ergonomic handheld ultrasound probe providing contact forces and pose informationNoh Y Housden RJ Gomez A Knight C Garcia F Liu H
2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). vol. 2015, 5773-5776.
01-08-2015 Design, testing and modelling of a novel robotic system for trans-oesophageal ultrasound.Wang S Singh D Althoefer K
International Journal of Medical Robotics and Computer Assisted Surgery,
Wiley: 12 Months vol. 12 (3), 342-354.
31-07-2015 Identification of Haptic Based Guiding Using Hard ReinsRanasinghe A Dasgupta P Althoefer K
Plos One,
Public Library of Science (Plos) vol. 10 (7)
22-07-2015 Novel Tactile-SIFT Descriptor for Object Shape RecognitionLuo S Mou W Althoefer K
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 15 (9), 5001-5009.
13-07-2015 Using visual cues to enhance haptic feedback for palpation on virtual model of soft tissueLi M Konstantinova J Secco EL Liu H Nanayakkara T Dasgupta P
Medical & Biological Engineering & Computing,
Springer Nature vol. 53 (11), 1177-1186.
28-05-2015 Localizing the Object Contact through Matching Tactile Features with Visual MapLuo S Mou W Althoefer K Liu H
2015 IEEE International Conference on Robotics and Automation (ICRA)., 3903-3908.
01-05-2015 Tendon and Pressure Actuation for a Bio-Inspired Manipulator Based on an Antagonistic PrincipleMaghooa F Stilli A Noh Y Althoefer K
2015 IEEE International Conference on Robotics and Automation (ICRA)., 2556-2561.
01-05-2015 A Fiber-Optics-Based Body Contact Sensor for a Flexible ManipulatorXie H Liu H Noh Y Wang S
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 15 (6), 3543-3550.
01-05-2015 Batch-Specific Discrimination Using Nuclear Quadrupole Resonance SpectroscopyKyriakidou G Jakobsson A Althoefer K
Analytical Chemistry,
American Chemical Society (Acs) vol. 87 (7), 3806-3811.
12-03-2015 Global estimation of an object’s pose using tactile sensingBimbo J Kormushev P Liu H
Advanced Robotics,
Taylor & Francis vol. 29 (5), 363-374.
04-03-2015 Finger contact sensing and the application in dexterous hand manipulationLiu H Nguyen KC Perdereau V Godden M Seneviratne LD
Autonomous Robots,
Springer Nature vol. 39 (1), 25-41.
21-01-2015 A 7.5mm Steiner Chain Fibre-Optic System for Multi-Segment Flex SensingSareh S Noh Y Ranzani T Wurdemann H Liu H
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)., 2336-2341.
01-01-2015 Catheter Contact Force Estimation from Shape Detection Using a Real-Time Cosserat Rod ModelBack J Manwell T Karim R Rhode K Althoefer K
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)., 2037-2042.
01-01-2015 Feasibility Study-Novel Optical Soft Tactile Array Sensing for Minimally Invasive SurgeryBack J Dasgupta P Seneviratne L Liu H
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)., 1528-1533.
01-01-2015 Force and Proximity Fingertip Sensor to Enhance Grasping PerceptionKonstantinova J Stilli A
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)., 2118-2123.
01-01-2015 Novel Method to form Adaptive Internal Impedance Profiles in WalkersMorland MFE Althoefer K
2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC). vol. 2015, 7764-7767.
01-01-2015 Tension Sensing for a Linear Actuated Catheter RobotBack J Karim R Noh Y Rhode K Althoefer K
Lecture Notes in Computer Science. vol. 9245, 472-482.
01-01-2015 Tactile Object Recognition with Semi-Supervised LearningLuo S Liu X Liu H
Lecture Notes in Computer Science. vol. 9245, 15-26.
01-01-2015 Minimally invasive surgery employing antagonistic, inflatable robot: evaluation of positioning accuracy and motion dynamicsAlthoefer K Stilli A
BJU INTERNATIONAL. vol. 116, 48-49.
01-01-2015 Lecture Notes in Computer Science: An Antagonistic Actuation Technique for Simultaneous Stiffness and Position ControlWurdemann HA Stilli A
Lecture Notes in Computer Science. vol. 9246, 164-174.
01-01-2015 Surface Classification for Crawling Peristaltic Worm RobotManwell T Jupp A Althoefer K
Lecture Notes in Computer Science. vol. 9246, 175-184.
01-01-2015 Kinematic analysis of a mechanism with dual remote centre of motion and its potential applicationBai G Qi P Althoefer K Li D
Proceedings of the ASME Design Engineering Technical Conference. vol. 5B-2015
01-01-2015 Stiffness Control of Soft Robotic Manipulator for Minimally Invasive Surgery (MIS) Using Scale JammingSadati SMH Noh Y Elnaz Naghibi S
Lecture Notes in Computer Science. vol. 9246, 141-151.
01-01-2015 2014
Accurate Bolt Tightening Using Model-Free Fuzzy Control for Wind Turbine Hub Bearing AssemblyDeters C Lam H-K Secco EL
IEEE Transactions on Control Systems Technology,
Institute of Electrical and Electronics Engineers (IEEE) vol. 23 (1), 1-12.
15-12-2014 Rotation and translation invariant object recognition with a tactile sensorLuo S Mou W Li M
IEEE SENSORS 2014 Proceedings., 1030-1033.
12-12-2014 Fuzzy Logic Control of a Continuum Manipulator for Surgical ApplicationsQi P Liu C Zhang L Wang S
2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014)., 413-418.
01-12-2014 Pseudo-haptics for rigid tool/soft surface interaction feedback in virtual environmentsLi M Ridzuan MB Sareh S Seneviratne LD
Mechatronics,
Elsevier vol. 24 (8), 1092-1100.
01-12-2014 Improved modeling and bounds for NQR spectroscopy signalsKyriakidou G Jakobsson A Gudmundson E Gregorovič A Barras J
European Signal Processing Conference., 2325-2329.
10-11-2014 Multi-fingered haptic palpation using pneumatic feedback actuatorsLi M Luo S Nanayakkara T Dasgupta P
Sensors and Actuators a Physical,
Elsevier vol. 218, 132-141.
01-10-2014 Robotic Granular Jamming: Does the Membrane Matter?Jiang A Ranzani T Gerboni G Lekstutyte L Dasgupta P
Soft Robotics,
Sage Publications vol. 1 (3), 192-201.
01-09-2014 Modeling and Optimizing Output Characteristics of Intensity Modulated Optical Fiber-Based Displacement SensorsWanninayake IB Dasgupta P Seneviratne LD
IEEE Transactions on Instrumentation and Measurement,
Institute of Electrical and Electronics Engineers (IEEE) vol. 64 (3), 758-767.
28-08-2014 Six Dimensional Compliance Analysis of Ortho-Planar Springs for a Continuum ManipulatorQiu C Qi P Liu HB
Volume 5A: 38th Mechanisms and Robotics Conference., v05at08a036-v05at08a036.
17-08-2014 An Optical Tactile Array Probe Head for Tissue Palpation During Minimally Invasive SurgeryXie H Liu H Seneviratne LD Althoefer K
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 14 (9), 3283-3291.
28-07-2014 Multi-fingered haptic palpation utilizing granular jamming stiffness feedback actuatorsLi M Ranzani T Sareh S Dasgupta P Wurdemann HA
Smart Materials and Structures,
Iop Publishing vol. 23 (9)
17-07-2014 Implementation of Tactile Sensing for Palpation in Robot-Assisted Minimally Invasive Surgery: A ReviewKonstantinova J Althoefer K Nanayakkara T
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 14 (8), 2490-2501.
26-06-2014 MRI‐safe robots. Why are they not yet routinely used?Althoefer K
Bju International,
Wiley vol. 113 (6), 975-976.
01-06-2014 The granular jamming integrated actuatorJiang A Adejokun S Faragasso A Althoefer K
2014 International Conference on Advanced Robotics and Intelligent Systems (ARIS)., 12-17.
01-06-2014 Soft Robotics Technologies to Address Shortcomings in Today's Minimally Invasive Surgery: The STIFF-FLOP ApproachCianchetti M Ranzani T Gerboni G Althoefer K
Soft Robotics,
Sage Publications vol. 1 (2), 122-131.
01-06-2014 Robot guided bolt tensioning tool with adaptive process control for the automated assembly of wind turbine rotor blade bearingsMüller R Hörauf L Vette M Alzaga A Hohmann J Althoefer K
Production Engineering,
Springer Nature vol. 8 (6), 755-764.
30-05-2014 Behavioral Characteristics of Manual Palpation to Localize Hard Nodules in Soft TissuesKonstantinova J Li M Mehra G Dasgupta P Althoefer K
IEEE Transactions on Biomedical Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 61 (6), 1651-1659.
15-05-2014 Intra-operative tumour localisation in robot-assisted minimally invasive surgery: A reviewLi M Liu H Seneviratne LD Dasgupta P Althoefer K
Proceedings of The Institution of Mechanical Engineers Part H Journal of Engineering in Medicine,
Sage Publications vol. 228 (5), 509-522.
01-05-2014 Estimation of Tissue Stiffness Using a Prototype of Air-Float Stiffness ProbeWanninayake IB Althoefer K
2014 IEEE International Conference on Robotics and Automation (ICRA)., 1426-1431.
01-05-2014 Novel Uniaxial Force Sensor Based on Visual Information for Minimally Invasive SurgeryFaragasso A Bimbo J Noh Y Jiang A Sareh S Liu H
2014 IEEE International Conference on Robotics and Automation (ICRA)., 1405-1410.
01-05-2014 Simplifying Grasping Complexity through Generalization of Kinaesthetically Learned SynergiesCotugno G Mohan V Althoefer K Nanayakkara T
2014 IEEE International Conference on Robotics and Automation (ICRA)., 5345-5351.
01-05-2014 A Novel Tumor Localization Method using Haptic Palpation based on Soft Tissue Probing DataLi M Faragasso A Konstantinova J Aminzadeh V Dasgupta P
2014 IEEE International Conference on Robotics and Automation (ICRA)., 4188-4193.
01-05-2014 Bio-Inspired Tactile Sensor Sleeve for Surgical Soft ManipulatorsSareh S Jiang A Faragasso A Noh Y Dasgupta P Wurdemann RA
2014 IEEE International Conference on Robotics and Automation (ICRA)., 1454-1459.
01-05-2014 Control a Contact Sensing Finger for Surface Haptic ExplorationBack J Bimbo J Noh Y Seneviratne L
2014 IEEE International Conference on Robotics and Automation (ICRA)., 2736-2741.
01-05-2014 A Three-Axial Body Force Sensor for Flexible ManipulatorsNoh Y Sareh S Back J Würdemann HA Ranzani T Secco EL Althoefer K
2014 IEEE International Conference on Robotics and Automation (ICRA)., 6388-6393.
01-05-2014 Surface flattening of the human left atrium and proof-of-concept clinical applicationsKarim R Ma Y Jang M Housden RJ Williams SE Chen Z Althoefer K Rinaldi CA et al.
Computerized Medical Imaging and Graphics,
Elsevier vol. 38 (4), 251-266.
02-02-2014 Magnetic Resonance-Compatible Tactile Force Sensor Using Fiber Optics and Vision SensorXie H Jiang A Liu H Althoefer K
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 14 (3), 829-838.
17-01-2014 Endoscopic Add-on Stiffness Probe for Real-time Soft Surface Characterisation in MISFaragasso A Stilli A Bimbo J Noh Y Liu H Nanayakkara T
2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. vol. 2014, 6517-6520.
01-01-2014 Towards Kinematic Modeling of a Multi-DOF Tendon Driven Robotic CatheterQi P Liu H Seneviratne L
2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. vol. 2014, 3009-3012.
01-01-2014 A Continuum Body Force Sensor Designed for Flexible Surgical Robotics DevicesNoh Y Secco EL Sareh S Würdemann H Farazasso A Liu H
2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. vol. 2014, 3711-3714.
01-01-2014 Elastic Mesh Braided Worm Robot for Locomotive EndoscopyManwell T Vitek T Ranzani T
2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society. vol. 2014, 848-851.
01-01-2014 Shrinkable, stiffness-controllable soft manipulator based on a bio-inspired antagonistic actuation principleStilli A Wurdemann HA
2014 IEEE/RSJ International Conference on Intelligent Robots and Systems., 2476-2481.
01-01-2014 A Novel Continuum-Style Robot with Multilayer Compliant ModulesQi P Qiu C Liu H
2014 IEEE/RSJ International Conference on Intelligent Robots and Systems., 3175-3180.
01-01-2014 Nuclear quadrupole resonance of pentaerythritol tetranitrate (PETN) in different compositionsRowe MD Smith JAS Barras J
Nato Science For Peace and Security Series B Physics and Biophysics, 35-43.
01-01-2014 Nuclear Quadrupole Resonance of Pentaerythritol Tetranitrate (PETN) in Different CompositionsRowe MD Smith JAS Barras J
MAGNETIC RESONANCE DETECTION OF EXPLOSIVES AND ILLICIT MATERIALS., 35-43.
01-01-2014 2013
Combining Touch and Vision for the Estimation of an Object's Pose During ManipulationBimbo J Seneviratne LD
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems., 4021-4026.
01-11-2013 A Two Party Haptic Guidance Controller Via a Hard ReinRanasinghe A Penders J Dasgupra P Althoefcr K
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems., 116-122.
01-11-2013 Force-Velocity Modulation Strategies for Soft Tissue ExaminationKonstantinova J Li M Aminzadeh V Dasgupta P Althoefer K
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems., 1998-2003.
01-11-2013 Fiber Optics Tactile Array Probe for Tissue Palpation during Minimally Invasive SurgeryXie H Liu* H Seneviratne LD
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems., 2539-2544.
01-11-2013 An Optimal State Dependent Haptic Guidance Controller Via a Hard ReinRanasinghe A Althoefer K Nanayakkara T Penders J
2013 IEEE International Conference on Systems, Man, and Cybernetics., 2322-2327.
01-10-2013 Haptics for Multi-Fingered PalpationLi M Luo S Seneviratne LD Althoefer K
2013 IEEE International Conference on Systems, Man, and Cybernetics., 4184-4189.
01-10-2013 Evaluating Manual Palpation Trajectory Patterns in Tele-Manipulation for Soft Tissue ExaminationKonstantinova J Li M Aminzadeh V Dasgupta P
2013 IEEE International Conference on Systems, Man, and Cybernetics., 4190-4195.
01-10-2013 Inverse finite-element modeling for tissue parameter identification using a rolling indentation probeLiu H Sangpradit K Li M Dasgupta P Seneviratne LD
Medical & Biological Engineering & Computing,
Springer Nature vol. 52 (1), 17-28.
15-09-2013 Efficient Break-Away Friction Ratio and Slip Prediction Based on Haptic Surface ExplorationSong X Liu H Nanayakkara T
IEEE Transactions on Robotics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 30 (1), 203-219.
11-09-2013 Nuclear Quadrupole Resonance of Pentaerythritol Tetranitrate (PETN) in Different CompositionsRowe MD Smith JAS
In
Magnetic Resonance Detection of Explosives and Illicit Materials,
Springer Nature 35-43.
10-08-2013 Granular Jamming With Hydraulic ControlJiang A Aste T Dasgupta P
Volume 6A: 37th Mechanisms and Robotics Conference., v06at07a021-v06at07a021.
04-08-2013 Granular jamming transitions for a robotic mechanismJiang A Aste T Dasgupta P Nanayakkara T
AIP Conference Proceedings. vol. 1542 (1), 385-388.
18-06-2013 Air-float Palpation Probe for Tissue Abnormality Identification During Minimally Invasive SurgeryWanninayake IB Seneviratne LD Althoefer K
IEEE Transactions on Biomedical Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 60 (10), 2735-2744.
20-05-2013 Model-free Fuzzy Tightening Control for Bolt/Nut Joint Connections of Wind Turbine HubsDeters C Secco EL Lam HK Seneviratne LD
2013 IEEE International Conference on Robotics and Automation., 270-276.
01-05-2013 An Optical Curvature Sensor for Flexible ManipulatorsSearle TC Althoefer K Seneviratne L
2013 IEEE International Conference on Robotics and Automation., 4415-4420.
01-05-2013 Control Design for Interval Type-2 Fuzzy Systems Under Imperfect Premise MatchingLam HK Li H Deters C Secco EL
IEEE Transactions on Industrial Electronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 61 (2), 956-968.
15-03-2013 Observational Learning: Basis, Experimental Results and Models, and Implications for RoboticsTaylor JG Cutsuridis V Althoefer K
Cognitive Computation,
Springer Nature vol. 5 (3), 340-354.
26-02-2013 Nitrogen-14 Nuclear Quadrupole Resonance Spectroscopy: A Promising Analytical Methodology for Medicines Authentication and Counterfeit Antimalarial AnalysisBarras J Murnane D Althoefer K Assi S Poplett IJF Smith JAS
Analytical Chemistry,
American Chemical Society (Acs) vol. 85 (5), 2746-2753.
20-02-2013 Potential of nuclear quadrupole resonance spectroscopy for detection and characterization of counterfeit anti-malarial medicinesBarras J Althoefer K Kyriakidou G Rowe M Poplett I Assi S
Tropical Medicine & International Health vol. 18, 21-21.
01-01-2013 2012
A stiffness probe for soft tissue abnormality identification during laparoscopic surgeryLi J Liu H Althoefer K
World Automation Congress Proceedings.
14-12-2012 Object surface classificaiton based on friction properties for intelligent robotic handsSong X Liu H Bimbo J Althoefer K
World Automation Congress Proceedings.
14-12-2012 Novel Force Sensing Approach Employing Prismatic-Tip Optical Fiber Inside an Orthoplanar Spring StructureAtaollahi A Fallah AS Seneviratne LD
IEEE/Asme Transactions on Mechatronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 19 (1), 121-130.
15-11-2012 Variable-Pitch Rectangular Cross-section Radiofrequency Coils for the Nitrogen-14 Nuclear Quadrupole Resonance Investigation of Sealed Medicines PacketsBarras J Katsura S Sato-Akaba H Itozaki H Kyriakidou G Althoefer KA
Analytical Chemistry,
American Chemical Society (Acs) vol. 84 (21), 8970-8972.
26-10-2012 Developing a Magnetic Resonance-Compatible Catheter for Cardiac CatheterizationYao W Schaeffter T Seneviratne L Althoefer K
Journal of Medical Devices,
Asme International vol. 6 (4)
11-10-2012 Pixel-based Optical Fiber Tactile Force Sensor for Robot ManipulationXie H Jiang A Seneviratne L Althoefer K
2012 IEEE Sensors., 1-4.
01-10-2012 Adaptive grip control on an uncertain objectJiang A Bimbo J Goulder S Liu H Song X
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems., 1161-1166.
01-10-2012 Surface Material Recognition through Haptic Exploration using an Intelligent Contact Sensing FingerLiu H Bimbo J Seneviratne L Althoefer K
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems., 52-57.
01-10-2012 A Novel Dynamic Slip Prediction and Compensation Approach Based on Haptic Surface ExplorationSong X Liu H Bimbo J
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. vol. 1, 4511-4516.
01-10-2012 Design of a Variable Stiffness Flexible Manipulator with Composite Granular Jamming and Membrane CouplingJiang A Xynogalas G Dasgupta P Althoefer K
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems., 2922-2927.
01-10-2012 A 2-Axis Optical Force–Torque Fingertip Sensor for Dexterous Grasping Using Linear PolarizersSargeant R Althoefer K
IEEE Transactions on Instrumentation and Measurement,
Institute of Electrical and Electronics Engineers (IEEE) vol. 61 (12), 3363-3377.
17-09-2012 Object Pose Estimation and Tracking by Fusing Visual and Tactile InformationBimbo J Rodríguez-Jiménez S Liu H Song X Abderrahim M
2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI)., 65-70.
01-09-2012 An Optical Multi-axial Force/Torque Sensor for Dexterous Grasping and ManipulationSargeant R Liu H Seneviratne LD
2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI)., 144-149.
01-09-2012 Tactile Image based Contact Shape Recognition using Neural NetworkLiu H Greco J Song X Bimbo J Seneviratne L
2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI)., 138-143.
01-09-2012 A Variable Stiffness Joint by Granular JammingJiang A Ataollahi A Althoefer K Dasgupta P
Volume 4: 36th Mechanisms and Robotics Conference, Parts A and B., 267-275.
12-08-2012 Automated Screw Insertion Monitoring Using Neural Networks: A Computational Intelligence Approach to Assembly in ManufacturingLara B Seneviratne LD
In
Computational Intelligence and Its Applications,
World Scientific Publishing 183-209.
04-07-2012 Miniature 3-Axis Distal Force Sensor for Minimally Invasive Surgical PalpationPuangmali P Liu H Seneviratne LD
IEEE/Asme Transactions on Mechatronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 17 (4), 646-656.
04-05-2012 An Investigation of the Use of Linear Polarizers to Measure Force and Torque in Optical 6-DOF Force/Torque Sensors for Dexterous ManipulatorsSargeant R Seneviratne LD
2012 IEEE International Conference on Robotics and Automation., 1422-1427.
01-05-2012 A Computationally Fast Algorithm for Local Contact Shape and Pose Classification using a Tactile Array SensorLiu H Song X Seneviratne LD
2012 IEEE International Conference on Robotics and Automation., 1410-1415.
01-05-2012 Novel Indentation Depth Measuring System for Stiffness Characterization in Soft Tissue PalpationWanninayake IB Althoefer K
2012 IEEE International Conference on Robotics and Automation. vol. 1, 4648-4653.
01-05-2012 Tissue stiffness simulation and abnormality localization using pseudo-haptic feedback**Research partially funded under the 7th Framework Program, grant agreement 287728 (EU project title: STIFF-FLOP), THEME 3: “Information and Communication Technologies”, Challenge 2: Cognitive Systems and Robotics.Li M Liu H Li J Seneviratne LD
2012 IEEE International Conference on Robotics and Automation. vol. 1, 5359-5364.
01-05-2012 The Emerging Field of Medicines Authentication by Nuclear Quadrupole Resonance SpectroscopyBarras J Althoefer K Poplett IJ
Applied Magnetic Resonance,
Springer Nature vol. 43 (4), 511-529.
22-03-2012 Triaxial Catheter-Tip Force Sensor for MRI-Guided Cardiac ProceduresPolygerinos P Seneviratne LD Schaeffter T
IEEE/Asme Transactions on Mechatronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 18 (1), 386-396.
17-01-2012 A stiffness probe based on force and vision sensing for soft tissue diagnosisLi J Liu H Seneviratne LD
Annual International Conference of The IEEE Engineering in Medicine and Biology Society (Embc),
Institute of Electrical and Electronics Engineers (IEEE) vol. 2012, 944-947.
01-01-2012 Novel Air-float Tactile Array for Stiffness Characterization in Soft Tissue PalpationWanninayake IB Althoefer K
Procedia Engineering. vol. 41, 281-288.
01-01-2012 PROBING BEHAVIOUR FOR SOFT TISSUE STIFFNESS MEASUREMENTZirjakova J Althoefer K Dasgupta P
Journal of Endourology vol. 26, A20-A21.
01-01-2012 SIMULATED HAPTICS FOR MINIMALLY INVASIVE SURGERYLi M Dasgupta P Althoefer K
Journal of Endourology vol. 26, A48-A48.
01-01-2012 GRANULAR JAMMING FOR MINIMALLY INVASIVE SURGERIESJiang A Althoefer K
Journal of Endourology vol. 26, A403-A404.
01-01-2012 Intelligent Fingertip Sensing for Contact Information IdentificationLiu H Song X Bimbo J Althoefer K
01-01-2012 A Passive Robotic Platform for Three-Dimensional Scanning of Ex Vivo Soft TissueLi J Zirjakova J Yao W Dasgupta P
01-01-2012 Tissue diagnosis using a novel stiffness probe based on force and vision sensing: A feasibility studyLi J Liu H Dasgupta P
BRITISH JOURNAL OF SURGERY. vol. 99, 53-53.
01-01-2012 Reconfigurable Assembly Approach for Wind Turbines Using Multiple Intelligent AgentsDeters C Wurdemann HA Seneviratne LD
01-01-2012 2011
14N quadrupole resonance and 1H T1 dispersion in the explosive RDXSmith JAS Blanz M Rayner TJ Rowe MD
Journal of Magnetic Resonance,
Elsevier vol. 213 (1), 98-106.
10-09-2011 POD-06.03 Prostate Tumour Identification Using a Force-Sensitive Rolling Indentation ProbeKumar P Li J Liu H Challacombe B Chandra A Seneviratne L Althoefer K
Urology,
Elsevier vol. 78 (3), s20-s21.
01-09-2011 Slip parameter estimation for tele-operated ground vehicles in slippery terrainSong X Althoefer K
Proceedings of the Institution of Mechanical Engineers Part I Journal of Systems and Control Engineering. vol. 225 (6), 814-830.
14-07-2011 Tactile sensing for dexterous in-hand manipulation in robotics—A reviewYousef H Boukallel M Althoefer K
Sensors and Actuators a Physical,
Elsevier vol. 167 (2), 171-187.
01-06-2011 An Approach for Stability Analysis of Polynomial Fuzzy Model-Based Control SystemsNarimani M Lam HK Althoefer K Dilmaghan R Deters C
2011 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE 2011)., 2232-2237.
01-06-2011 Rolling Indentation Probe for Tissue Abnormality Identification during Minimally Invasive SurgeryLiu H Li J Althoefer K
IEEE Transactions on Robotics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 27 (3), 450-460.
07-04-2011 Finite-Element Modeling of Soft Tissue Rolling IndentationSangpradit K Liu H Dasgupta P Althoefer K
IEEE Transactions on Biomedical Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 58 (12), 3319-3327.
20-01-2011 Resuts of kidney lesion experiments with haptic probeLi J Liu H Dasgupta P Seneviratne LD
BRITISH JOURNAL OF SURGERY. vol. 98, 51-51.
01-01-2011 2010
Tissue parameter estimation for a mechatronic probe using inverse finite element analysisSangpradit K Althoefer K Seneviratne L
16th Annual Conference on Mechatronics and Machine Vision in Practice 2010 M2vip 2010., 96-110.
01-12-2010 Finite Element Modelling of Rolling Indentation for Tissue Adomanlity IdentificationSangpradit K Althoefer K
2010 11th International Conference on Control Automation Robotics & Vision., 163-168.
01-12-2010 A Robust Downward-Looking Camera Based Velocity Estimation with Height Compensation for Mobile RobotsSong X Althoefer K
2010 11th International Conference on Control Automation Robotics & Vision., 378-383.
01-12-2010 MRI-Compatible Intensity-Modulated Force Sensor for Cardiac Catheterization ProceduresPolygerinos P Ataollahi A Schaeffter T
IEEE Transactions on Biomedical Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 58 (3), 721-726.
29-11-2010 Modeling of Light Intensity-Modulated Fiber-Optic Displacement SensorsPolygerinos P Seneviratne LD
IEEE Transactions on Instrumentation and Measurement,
Institute of Electrical and Electronics Engineers (IEEE) vol. 60 (4), 1408-1415.
01-11-2010 MRI-Compatible Fiber-Optic Force Sensors for Catheterization ProceduresPolygerinos P Zbyszewski D Schaeffter T Razavi R Seneviratne LD
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 10 (10), 1598-1608.
01-10-2010 Tactile Sensor Array Using Prismatic-Tip Optical Fibers for Dexterous Robotic HandsAtaollahi A Polygerinos P Puangmali P Seneviratne LD
2010 IEEE/RSJ International Conference on Intelligent Robots and Systems., 910-915.
01-10-2010 A Comparative Study Between an Improved Novel Air-Cushion Sensor and a Wheeled Probe for Minimally Invasive SurgeryZbyszewski D Challacombe B Li J Seneviratne L
Journal of Endourology,
Sage Publications vol. 24 (7), 1155-1159.
01-07-2010 Track–terrain modelling and traversability prediction for tracked vehicles on soft terrainAl-Milli S Seneviratne LD Althoefer K
Journal of Terramechanics,
Elsevier vol. 47 (3), 151-160.
01-06-2010 Novel Miniature MRI-Compatible Fiber-Optic Force Sensor for Cardiac Catheterization ProceduresPolygerinos P Puangmali P Schaeffter T Seneviratne LD Althoefer K
2010 IEEE International Conference on Robotics and Automation., 2598-2603.
01-05-2010 Miniaturized Force-Indentation Depth Sensor for Tissue Abnormality Identification during Laparoscopic SurgeryLiu H Poon Q-I Seneviratne LD
2010 IEEE International Conference on Robotics and Automation., 3654-3659.
01-05-2010 Miniaturized Triaxial Optical Fiber Force Sensor for MRI-Guided Minimally Invasive SurgeryPuangmali P Dasgupta P Seneviratne LD Althoefer K
2010 IEEE International Conference on Robotics and Automation., 2592-2597.
01-05-2010 A Kalman Filter-Integrated Optical Flow Method for Velocity Sensing of Mobile RobotsSong X Seneviratne LD
IEEE/Asme Transactions on Mechatronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 16 (3), 551-563.
22-04-2010 An indentation depth—force sensing wheeled probe for abnormality identification during minimally invasive surgeryLiu H Puangmali P Zbyszewski D Elhage O Dasgupta P Dai JS Althoefer K
Proceedings of The Institution of Mechanical Engineers Part H Journal of Engineering in Medicine,
Sage Publications vol. 224 (6), 751-763.
22-04-2010 Magnetic field-cycling NMR and 14N, 17O quadrupole resonance in the explosive pentaerythritol tetranitrate (PETN)Smith JAS Rayner TJ Rowe MD Peirson NF
Journal of Magnetic Resonance,
Elsevier vol. 204 (1), 139-144.
21-02-2010 Force Sensing in Medical RoboticsAlthoefer K Liu H Puangmali P Zbyszewski D
In
Mechatronics in Action,
Springer Nature 157-172.
01-01-2010 Critical Resource Infrastructure Supervision and Intervention SystemArghir S Popescu D Humaila H
IFAC-PapersOnLine. vol. 43 (23), 70-76.
01-01-2010 2009
A haptic probe for soft tissue abnormality identification during minimally invasive surgeryLiu H Elhage O Dasgupta P Challacombe B Althoefer K
Proceedings of the 2009 ASME Iftomm International Conference on Reconfigurable Mechanisms and Robots Remar 2009., 417-422.
12-11-2009 Measuring Tip and Side Forces of a Novel Catheter Prototype: A Feasibility StudyPolygerinos P Schaeffter T Seneviratne L
2009 IEEE/RSJ International Conference on Intelligent Robots and Systems., 966-971.
01-10-2009 A Novel MRI Compatible Air-Cushion Tactile Sensor for Minimally Invasive SurgeryZbyszewski D Polygerinos P Seneviratne LD
2009 IEEE/RSJ International Conference on Intelligent Robots and Systems., 2647-2652.
01-10-2009 Rolling Mechanical Imaging for Tissue Abnormality Localization During Minimally Invasive SurgeryLiu H Noonan DP Challacombe BJ Althoefer K
IEEE Transactions on Biomedical Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 57 (2), 404-414.
29-09-2009 Air-Cushion Force-Sensitive Probe for Soft Tissue Investigation During Minimally Invasive SurgeryZbyszewski D Challacombe B Liu H Dasgupta P Murphy D
Journal of Endourology,
Sage Publications vol. 23 (9), 1421-1424.
01-09-2009 Mathematical Modeling of Intensity-Modulated Bent-Tip Optical Fiber Displacement SensorsPuangmali P Althoefer K
IEEE Transactions on Instrumentation and Measurement,
Institute of Electrical and Electronics Engineers (IEEE) vol. 59 (2), 283-291.
01-09-2009 THE SCIENCE BEHIND HAPTICS IN ROBOTIC UROLOGICAL SURGERYVivekananda U Henderson A Murphy DG Althoefer K Seneviratne L
Bju International,
Wiley vol. 104 (4), 433-434.
21-07-2009 Quantitative 35Cl Nuclear Quadrupole Resonance in Tablets of the Antidiabetic Medicine DiabineseTate E Althoefer K Rowe MD Smith JAS Pearce GES
Analytical Chemistry,
American Chemical Society (Acs) vol. 81 (13), 5574-5576.
03-06-2009 Hybrid Soil Parameter Measurement and Estimation Scheme for Excavation AutomationAlthoefer K Zweiri YH
IEEE Transactions on Instrumentation and Measurement,
Institute of Electrical and Electronics Engineers (IEEE) vol. 58 (10), 3633-3641.
26-05-2009 Novel Design of a 3-Axis Optical Fiber Force Sensor for Applications in Magnetic Resonance EnvironmentsPuangmali P Althoefer K
2009 IEEE International Conference on Robotics and Automation., 3682-3687.
01-05-2009 Tissue Identification using Inverse Finite Element Analysis of Rolling IndentationSangpradit K Liu H
2009 IEEE International Conference on Robotics and Automation., 1250-1255.
01-05-2009 A Fibre-Optic Catheter-Tip Force Sensor with MRI Compatibility: A Feasibility StudyPolygerinos P Schaeffter T Althoefer K
2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society. vol. 2009, 1501-1504.
01-01-2009 A Haptic Probe for Soft Tissue Abnormality Identification during Minimally Invasive SurgeryLiu H Elhage O Dasgupta P Challacombe B Murphy D
RECONFIGURABLE MECHANISMS AND ROBOTS., 436-+.
01-01-2009 The modelling and estimation of driving forces for unmanned ground vehicles in outdoor terrainSeneviratne L Zweiri Y Hutangkabodee S Song Z Song X Chhaniyara S
International Journal of Modelling Identification and Control,
Inderscience Publishers vol. 6 (1)
01-01-2009 Novel Design of a 3-Axis Optical Fiber Force Sensor for Applications in Magnetic Resonance EnvironmentsPuangmali P Seneviratne LD
ICRA: 2009 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-7., 2671-2676.
01-01-2009 Tissue Identification using Inverse Finite Element Analysis of Rolling IndentationSangpradit K Liu H Seneviratne LD
ICRA: 2009 IEEE INTERNATIONAL CONFERENCE ON ROBOTICS AND AUTOMATION, VOLS 1-7., 2933-+.
01-01-2009 A fibre-optic catheter-tip force sensor with MRI compatibility: a feasibility study.Polygerinos P Schaeffter T Seneviratne L
Annu Int Conf IEEE Eng Med Biol Soc vol. 2009, 1501-1054.
01-01-2009 A Vision Based Wheel Slip Estimation Technique for Mining VehiclesSong X Seneviratne L
Ifac-Papersonline,
Elsevier vol. 42 (23), 179-184.
01-01-2009 2008
A robust slip estimation method for skid-steered mobile robotsSong X Seneviratne LD Althoefer K
2008 10th International Conference on Control, Automation, Robotics and Vision., 279-284.
01-12-2008 A vision-based technique for vehicle slip and velocity estimationSong X Seneviratne LD Althoefer K
IFAC Proceedings Volumes IFAC Papersonline. vol. 17 (1 PART 1)
01-12-2008 Soil estimation based on dissipation energy during autonomous excavationMohseni-Vahed S Althoefer K Seneviratne LD Song X
IFAC Proceedings Volumes IFAC Papersonline. vol. 17 (1 PART 1)
01-12-2008 Slip parameter estimation of a single wheel using a non-linear observerSong ZB Seneviratne LD Althoefer K Song XJ
Robotica,
Cambridge University Press (Cup) vol. 27 (6), 801-811.
09-10-2008 Air-cushion force sensitive probe for soft tissue investigation during minimally invasive surgeryAlthoefer K Zbyszewski D Liu H Puangmali P Challacombe B Dasgupta P
2008 IEEE Sensors., 827-830.
01-10-2008 Robust Detection of Stochastic Nuclear Quadrupole Resonance SignalsSomasundaram SD Jakobsson A Rowe MD Butt NR
IEEE Transactions on Signal Processing,
Institute of Electrical and Electronics Engineers (IEEE) vol. 56 (9), 4221-4229.
01-09-2008 Maneuverability Performance of Tracked Vehicles on Soft TerrainsAl-Milli S Althoefer K Seneviratne LD
2008 IEEE/RSJ International Conference on Intelligent Robots and Systems., 107-112.
01-09-2008 Tactile Sensing using a Novel Air Cushion Sensor: A Feasibility StudyZbyszewski D Bhaumik A Althoefer K Seneviratne LD
2008 IEEE/RSJ International Conference on Intelligent Robots and Systems., 41-46.
01-09-2008 Optical Flow-Based Slip and Velocity Estimation Technique for Unmanned Skid-Steered VehiclesSong X Song Z Seneviratne LD
2008 IEEE/RSJ International Conference on Intelligent Robots and Systems., 101-106.
01-09-2008 EXPERIMENTAL STUDY ON TRACK-TERRAIN INTERACTION DYNAMICS IN AN INTEGRATED ENVIRONMENT: TEST RIGAL-MILLI S CHHANIYARA S GEORGIOU E ALTHOEFER K
Advances in Mobile Robotics., 1106-1113.
01-08-2008 VISUAL ODOMETRY TECHNIQUE USING CIRCULAR MARKER IDENTIFICATION FOR MOTION PARAMETER ESTIMATIONCHHANIYARA S ALTHOEFER K SENEVIRATNE LD
Advances in Mobile Robotics., 1069-1076.
01-08-2008 Automated failure classification for assembly with self-tapping threaded fastenings using artificial neural networksAlthoefer K Lara B
Proceedings of The Institution of Mechanical Engineers Part C Journal of Mechanical Engineering Science,
Sage Publications vol. 222 (6), 1081-1095.
01-06-2008 A new soft-tissue indentation model for estimating circular indenter ‘force—displacement’ characteristicsAl-ja'afreh T Zweiri Y Seneviratne L
Proceedings of The Institution of Mechanical Engineers Part H Journal of Engineering in Medicine,
Sage Publications vol. 222 (5), 805-815.
01-05-2008 Optical Fiber Sensor for Soft Tissue Investigation during Minimally Invasive SurgeryPuangmali P Liu H Althoefer K
2008 IEEE International Conference on Robotics and Automation., 2934-2939.
01-05-2008 Rolling Mechanical Imaging: A novel Approach for Soft Tissue Modelling and Identification during Minimally Invasive SurgeryLiu H Noonan DP Althoefer K
2008 IEEE International Conference on Robotics and Automation., 845-850.
01-05-2008 State-of-the-Art in Force and Tactile Sensing for Minimally Invasive SurgeryPuangmali P Althoefer K Seneviratne LD
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 8 (4), 371-381.
01-04-2008 Non-linear observer for slip estimation of tracked vehiclesSong Z-B Seneviratne LD
Proceedings of The I Mech E Part D Journal of Automobile Engineering,
Sage Publications vol. 222 (4), 515-533.
01-04-2008 Detecting Stochastic Nuclear Quadrupole Resonance Signals in the Presence of Strong Radio Frequency InterferenceSomasundaram SD Jakobsson A Rowe MD Althoefer K
2008 IEEE International Conference on Acoustics, Speech and Signal Processing., 3645-3648.
01-03-2008 Soil Parameter Identification and Driving Force Prediction for Wheel-Terrain InteractionHutangkabodee S Zweiri Y
International Journal of Advanced Robotic Systems vol. 5 (4), 425-432.
01-01-2008 Wheel/Tissue Force Interaction: A New Concept for Soft Tissue Diagnosis during MISZbyszewski D Liu H Althoefer K Nunes CS Seneviratne LD Challacombe B Dasgupta P
Annual International Conference of The IEEE Engineering in Medicine and Biology Society (Embc),
Institute of Electrical and Electronics Engineers (IEEE) vol. 2008, 5556-5559.
01-01-2008 Wheel/tissue force interaction: A new concept for soft tissue diagnosis during MISZbyszewski D Liu H Puangmali P Nunes CS Challacombe B
Proceedings of the 30th Annual International Conference of the IEEE Engineering in Medicine and Biology Society EMBS 08 Personalized Healthcare Through Technology., 5556-5559.
01-01-2008 Modelling soft tissue-mechatronic tool interactions during indentationja'afreh TMA Zweiri YH Seneviratne LD
International Journal of Modelling Identification and Control,
Inderscience Publishers vol. 4 (4)
01-01-2008 Non-linear observer for slip estimation of tracked vehiclesSong ZB Zweiri YH Seneviratne LD
Proceedings of The Institution of Mechanical Engineers Part D Journal of Automobile Engineering vol. 222 (4), 515-533.
01-01-2008 Optical Flow Algorithm for Velocity Estimation of Ground Vehicles: A Feasibility StudyChhaniyara S Bunnun P Seneviratne LD
International Journal on Smart Sensing and Intelligent Systems,
De Gruyter vol. 1 (1), 245-267.
01-01-2008 Soil Estimation Based on Dissipation Energy during Autonomous ExcavationVahed SM Song X Dai JS Lam HK
Ifac-Papersonline,
Elsevier vol. 41 (2), 13821-13826.
01-01-2008 2007
VISION-BASED VELOCITY ESTIMATION FOR UNMANNED GROUND VEHICLESSONG X SENEVIRATNE LD ALTHOEFER K
International Journal of Information Acquisition,
World Scientific Publishing vol. 4 (04), 303-315.
01-12-2007 On-line Energy-based Method for Soil Estimation and Classification in Autonomous ExcavationVahed SM Delaimi HA Seneviratne LD
2007 IEEE/RSJ International Conference on Intelligent Robots and Systems., 554-559.
01-10-2007 The Development of nonlinear Viscoelastic Model for the Application of Soft Tissue IdentificationLiu H Noonan DP Zweiri YH Althoefer KA
2007 IEEE/RSJ International Conference on Intelligent Robots and Systems., 208-213.
01-10-2007 Validation of Soil Parameter Identification for Track-Terrain Interaction DynamicsHutangkabodee S Zweiri YH Seneviratne LD
2007 IEEE/RSJ International Conference on Intelligent Robots and Systems., 3174-3179.
01-10-2007 Experimental Study of Soft Tissue Recovery using Optical Fiber ProbeLiu H Puangmali P
2007 IEEE/RSJ International Conference on Intelligent Robots and Systems., 516-521.
01-10-2007 Visual Odometry for Velocity Estimation of UGVsSong X Seneviratne LD Zweiri YH
2007 International Conference on Mechatronics and Automation., 1611-1616.
01-08-2007 Non-Linear Observer for Slip Parameter Estimation of Unmanned Wheeled VehiclesSong Z Song X Altheoer K
2007 International Conference on Mechatronics and Automation., 1213-1218.
01-08-2007 MOTION ESTIMATION AND SELF-LOCALIZATION BASED ON COMPUTER VISION AND ARTIFICIAL MARKER DEPOSITIONCHHANIYARA S ALTHOEFER K SENEVIRATNE LD
Advances in Climbing and Walking Robots., 690-697.
01-07-2007 Detection of Stochastic Nuclear Quadrupole Resonance SignalsSomasundaram SD Jakobsson A Butt NR Rowe MD Smith JAS
2007 15th International Conference on Digital Signal Processing., 367-370.
01-07-2007 An Ultrasonic Profiling Method for the Inspection of Tubular StructuresGomez F Althoefer K Seneviratne LD
Computer-Aided Civil and Infrastructure Engineering,
Elsevier vol. 22 (6), 400-418.
06-06-2007 Equipamiento y tecnologa en robticaMurphy D Challacombe B Nedas T Elhage O Althoefer K Seneviratne L
Archivos EspañOles De UrologíA,
Archivos Espanoles De Urologia vol. 60 (4), 349-355.
01-05-2007 Exploiting Spin Echo Decay in the Detection of Nuclear Quadrupole Resonance SignalsSomasundaram SD Jakobsson A
IEEE Transactions on Geoscience and Remote Sensing,
Institute of Electrical and Electronics Engineers (IEEE) vol. 45 (4), 925-933.
01-04-2007 A Dual-Function Wheeled Probe for Tissue Viscoelastic Property Identification during Minimally Invasive SurgeryNoonan DP Liu H Zweiri YH
Proceedings 2007 IEEE International Conference on Robotics and Automation., 2629-2634.
01-04-2007 A novel approach for Self-Localization based on Computer Vision and Artificial Marker DepositionChhaniyara S Zweiri YH Althoefer K
2007 IEEE International Conference on Networking, Sensing and Control., 139-144.
01-04-2007 Automated Pipe Defect Detection and Categorization Using Camera/Laser-Based Profiler and Artificial Neural NetworkDuran O Althoefer K
IEEE Transactions on Automation Science and Engineering,
Institute of Electrical and Electronics Engineers (IEEE) vol. 4 (1), 118-126.
01-01-2007 Vehicle-terrain interaction modeling and identification in rough terrainSeneviratne L Zweiri Y Hutangkabodee S Chhaniyara S
ICIIS 2007: SECOND INTERNATIONAL CONFERENCE ON INDUSTRIAL AND INFORMATION SYSTEMS 2007, CONFERENCE PROCEEDINGS., 11-15.
01-01-2007 Experimental study of soft tissue recovery using optical fiber probeLiu H Althoefer KA Seneviratne LD
2007 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-9., 522-527.
01-01-2007 Validation of soil parameter identification for track-terrain interaction dynamicsHutangkabodee S Zweiri YH Althoefer K
2007 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-9., 3180-+.
01-01-2007 DYNAMIC ANALYSIS AND TRAVERSABILITY PREDICTION OF TRACKED VEHICLES ON SOFT TERRAINAl-Milli S Althoefer K
2007 IEEE International Conference on Networking, Sensing and Control., 279-284.
01-01-2007 On-line energy-based method for soil estimation and classification in autonomous excavationVahed SM Delaimi HA Seneviratne LD
2007 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-9., 560-565.
01-01-2007 The development of nonlinear viscoelastic model for the application of soft tissue identificationLiu H Noonan DP Seneviratne LD
2007 IEEE/RSJ INTERNATIONAL CONFERENCE ON INTELLIGENT ROBOTS AND SYSTEMS, VOLS 1-9., 214-+.
01-01-2007 MODEL-BASED SOIL PARAMETER IDENTIFICATION FOR WHEEL-TERRAIN INTERACTION DYNAMICSHutangkabodee S Seneviratne LD
Ifac-Papersonline,
Elsevier vol. 40 (20), 578-583.
01-01-2007 NON-LINEAR OBSERVER FOR SLIP PARAMETER ESTIMATION OF UNMANNED WHEELED VEHICLESSong Z Zweiri Y Althoefer K
IFAC-PapersOnLine. vol. 40 (20), 458-463.
01-01-2007 2006
Multi-solution problem for track-terrain interaction dynamics and lumped soil parameter identificationHutangkabodee S Zweiri YH Seneviratne LD
Springer Tracts in Advanced Robotics vol. 25, 517-528.
27-09-2006 Modelling of closed-chain manipulators on an excavator vehicleZweiri YH Althoefer K
Mathematical and Computer Modelling of Dynamical Systems,
Taylor & Francis vol. 12 (4), 329-345.
01-08-2006 Soil parameter identification for wheel-terrain interaction dynamics and traversability predictionHutangkabodee S Zweiri YH
Machine Intelligence Research,
Springer Nature vol. 3 (3), 244-251.
01-07-2006 Simulation of ultrasound imaging inside fully charged pipesGomez F Althoefer K
Automation in Construction,
Elsevier vol. 15 (3), 355-364.
01-05-2006 Frequency selective detection of nuclear quadrupole resonance (NQR) spin echoesSomasundaram SD Jakobsson A Smith JAS
Detection and Remediation Technologies for Mines and Minelike Targets XI. vol. 6217
01-05-2006 Non-linear observer for slip estimation of tracked vehiclesSong ZB Zweiri YH Althoefer K
13th Annual International Conference on Mechatronics and Machine Vision in Practice 2006., 13-23.
01-01-2006 Detection of landmines using Nuclear Quadrupole Resonance (NQR): Signal processing to aid classificationSomasundaram SD Althoefer K Seneviratne LD
Proceedings of the 8th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines Clawar 2005., 833-840.
01-01-2006 Performance Prediction of a Wheeled Vehicle on Unknown Terrain Using Identified Soil ParametersHutangkabodee S Zweiri YH Althoefer K
Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006.., 3356-3361.
01-01-2006 Non-linear Observer for Slip Estimation of Skid-steering VehiclesSong Z Zweiri YH Seneviratne LD
Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006.., 1499-1504.
01-01-2006 Development of an Improved Micro Piezoelectric Power Generation/Actuation System for Biomedical and Bio-MEMS ApplicationsRao A Noonan D Althoefer K
ASME 2006 Frontiers in Biomedical Devices Conference., 37-38.
01-01-2006 Detection of Landmines Using Nuclear Quadrupole Resonance (NQR): Signal Processing to Aid ClassificationSomasundaram SD Althoefer K Smith JAS
01-01-2006 Multi-solution Problem for Track-Terrain Interaction Dynamics and Lumped Soil Parameter IdentificationHutangkabodee S Zweiri YH Seneviratne LD
Springer Tracts in Advanced Robotics. vol. 25, 517-528.
01-01-2006 2005
Non-linear observer for estimating slips of wheeled vehiclesSong ZB Zweiri YH Seneviratne LD
12th Annual Conference on Mechatronics and Machine Vision in Practice M2vip 2005., 71-77.
01-12-2005 Stability analysis of a three-term backpropagation algorithmZweiri YH Seneviratne LD
Neural Networks,
Elsevier vol. 18 (10), 1341-1347.
30-08-2005 Wheel-Tooling Gap Measurement System for Conform™ Extrusion Machinery Based on a Capacitive SensorKhawaja K Seneviratne L Althoefer K
Journal of Manufacturing Science and Engineering,
Asme International vol. 127 (2), 394-401.
25-04-2005 Online Soil Parameter Estimation Scheme Based on Newton–Raphson Method for Autonomous ExcavationTan CP Zweiri YH Althoefer K
IEEE/Asme Transactions on Mechatronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 10 (2), 221-229.
01-04-2005 Monitoring of Self-Tapping Screw Fastenings Using Artificial Neural NetworksAlthoefer K Lara B Seneviratne LD
Journal of Manufacturing Science and Engineering,
Asme International vol. 127 (1), 236-243.
01-02-2005 Online Soil-bucket Interaction Identification for Autonomous ExcavationTan C Zweiri YH
Proceedings of the 2005 IEEE International Conference on Robotics and Automation., 3576-3581.
01-01-2005 TRAVERSABILITY PREDICTION FOR UNMANNED GROUND VEHICLES BASED ON IDENTIFIED SOIL PARAMETERSHutangkabodee S Zweiri YH Seneviratne LD
IFAC-PapersOnLine. vol. 38 (1), 25-30.
01-01-2005 DRIVER SUPPORT SYSTEM BASED ON A NON-LINEAR SLIP OBSERVER FOR OFF ROAD VEHICLESSong ZB Zweiri YH
IFAC-PapersOnLine. vol. 38 (1), 83-88.
01-01-2005 2004
Identification methods for excavator arm parametersZweiri YH Seneviratne LD Althoefer K
Proceedings of the SICE Annual Conference., 1645-1650.
01-12-2004 Laser profiler model for robot-based pipe inspectionDuran O Althoefer K
Robotics Trends Principles and Applications Proceedings of the Sixth Biannual World Automation Congress Wac., 353-358.
01-12-2004 Identification of soil parameters for unmanned ground vehicles track-terrain interaction dynamicsSong Z Hutangkabodee S Zweiri YH Seneviratne LD
Proceedings of the SICE Annual Conference., 1651-1656.
01-12-2004 Parameter Estimation for Excavator Arm Using Generalized Newton MethodZweiri YH Seneviratne LD
IEEE Transactions on Robotics. vol. 20 (4), 762-767.
01-08-2004 Model Based Monitoring Strategies for Threaded Assembly SystemKlingajay M Seneviratne LD
Ifac-Papersonline,
Elsevier vol. 37 (4), 533-538.
01-04-2004 An ultrasonic profiling method for sewer inspectionGomez F Althoefer K
IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA '04. 2004. vol. 5, 4858-4863.
01-01-2004 Kinematic and dynamic analysis of unmanned mobile tracked ground vehicles with onboard manipulatorsZweiri YH Seneviratne LD
ELEVENTH WORLD CONGRESS IN MECHANISM AND MACHINE SCIENCE, VOLS 1-5, PROCEEDINGS., 2248-2252.
01-01-2004 Hybrid Model in a Real-Time Soil Parameter Identification Scheme for Autonomous ExcavationTan C Zweiri YH Seneviratne LD
IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA '04. 2004. vol. 5, 5268-5273.
01-01-2004 Gap Sensing Benefits in Conform™ Extrusion MachineryKhawaja K Althoefer K
IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA '04. 2004. vol. 1, 529-534.
01-01-2004 Automated Pipe Inspection Using ANN and Laser Data FusionDuran O Seneviratne LD
IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA '04. 2004. vol. 5, 4875-4880.
01-01-2004 Identification of soil parameters for unmanned ground vehicles track-terrain interaction dynamicsSong Z Hutangkabodee S Zweiri YH Althoefer K
SICE 2004 ANNUAL CONFERENCE, VOLS 1-3., 2255-2260.
01-01-2004 Identification methods for excavator arm parametersZweiri YH Seneviratne LD Althoefer K
SICE 2004 ANNUAL CONFERENCE, VOLS 1-3., 1061-1066.
01-01-2004 Non-Invasive Laser Based Measurement of the Helicoidal Motion of a Vibratory Platform With Three Leaf-Spring LegsSilversides RW Dai JS Althoefer KA
Volume 2: 28th Biennial Mechanisms and Robotics Conference, Parts A and B., 1231-1239.
01-01-2004 2003
Soil parameters estimation for automated excavationTan C Zweiri YH Althoefer K
International Conference on Mechatronics ICOM 2003., 557-562.
01-12-2003 Modelling of rotating ultrasonic sensors for pipe inspectionGomez F Seneviratne LD
International Conference on Mechatronics ICOM 2003., 279-284.
01-12-2003 Pipe Inspection Using a Laser-Based Transducer and Automated Analysis TechniquesDuran O Althoefer K
IEEE/Asme Transactions on Mechatronics,
Institute of Electrical and Electronics Engineers (IEEE) vol. 8 (3)
01-09-2003 Modelling and control of an unmanned excavator vehicleZweiri YH Seneviratne LD
Proceedings of The Institution of Mechanical Engineers Part I Journal of Systems and Control Engineering,
Sage Publications vol. 217 (4), 259-274.
01-06-2003 Experiments using a Laser-based Transducer and Automated Analysis Techniques for Pipe InspectionDuran O Althoefer K Seneviratne LD
2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422). vol. 2, 2561-2566.
01-01-2003 A Sensor for Pipe Inspection: Model, Analysis and Image ExtractionDuran O Seneviratne LD
Proceedings 2003 International Conference on Image Processing (Cat. No.03CH37429). vol. 3
01-01-2003 Identification of threaded fastening parameters using the Newton Raphson MethodKlingajay M Althoefer K
Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453). vol. 2, 2055-2060.
01-01-2003 A Generalized Newton Method for Identification of Closed-chain Excavator Arm ParametersZweiri YH Althoefer K
2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422). vol. 1, 103-108.
01-01-2003 Modeling of Ultrasound Sensor for Pipe InspectionGomez F Althoefer K
2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422). vol. 2, 2555-2560.
01-01-2003 On-line Soil Property Estimation for Autonomous Excavator VehiclesTan C Zweiri YH Althoefer K
2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422). vol. 1, 121-126.
01-01-2003 2002
A Comparison of Dynamic Models of Various Complexity for Diesel EnginesZweiri YH Whidborne JF
Mathematical and Computer Modelling of Dynamical Systems,
Taylor & Francis vol. 8 (3), 273-289.
01-09-2002 State of the art in sensor technologies for sewer inspectionDuran O Althoefer K Seneviratne LD
IEEE Sensors Journal,
Institute of Electrical and Electronics Engineers (IEEE) vol. 2 (2), 73-81.
01-04-2002 Parameter estimation during automated screw insertionsKlingajay M Althoefer K
2002 IEEE International Conference on Industrial Technology, 2002. IEEE ICIT '02.. vol. 2, 1019-1024.
01-01-2002 Automated Sewer Pipe Inspection through Image ProcessingDuran O Althoefer K
Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292). vol. 3, 2551-2556.
01-01-2002 A New Three-Term Backpropagation Algorithm with Convergence AnalysisZweiri YH Whidborne JF Althoefer K
Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No.02CH37292). vol. 4, 3882-3887.
01-01-2002 Automated Sewer Inspection using Image Processing and a Neural ClassifierDuran O Althoefer K
Proceedings of the 2002 International Joint Conference on Neural Networks. IJCNN'02 (Cat. No.02CH37290). vol. 2, 1126-1131.
01-01-2002 Pipe Inspection using Intelligent Analysis Techniques with High Noise-ToleranceDuran O Althoefer K
IEEE/RSJ International Conference on Intelligent Robots and System. vol. 2, 1886-1891.
01-01-2002 Model-Based Automation for Heavy Duty Mobile ExcavatorZweiri YH Seneviratne LD Althoefer K
IEEE/RSJ International Conference on Intelligent Robots and System. vol. 3, 2967-2972.
01-01-2002 Monitoring of threaded fastenings in automated assembly using artificial neural networksSeneviratne LD Visuwan P
INTELLIGENT ASSEMBLY AND DISASSEMBLY 2001., 61-65.
01-01-2002 Automated laser-based profiler for sewer inspectionDuran O Althoefer K
INTELLIGENT AUTONOMOUS SYSTEMS 7., 84-91.
01-01-2002 Error classification of self-tapping screw fastenings in automated assemblyLara B Seneviratne L
INTELLIGENT ASSEMBLY AND DISASSEMBLY 2001., 31-36.
01-01-2002 Dynamic modelling of diesel engines for design applicationsZweiri YH Whidborne JF
COMPUTER-BASED DESIGN., 701-709.
01-01-2002 2001
Reinforcement learning in a rule-based navigator for robotic manipulatorsAlthoefer K Krekelberg B Seneviratne L
Neurocomputing,
Elsevier vol. 37 (1-4), 51-70.
01-04-2001 Theoretical modelling of the self-tapping screw fastening processSeneviratne LD Ngemoh FA Earles SWE
Proceedings of The Institution of Mechanical Engineers Part C Journal of Mechanical Engineering Science,
Sage Publications vol. 215 (2), 135-154.
01-02-2001 2000
Mechatronic strategies for torque control of electric powered screwdriversAlthoefer K Seneviratne LD
Proceedings of The Institution of Mechanical Engineers Part C Journal of Mechanical Engineering Science,
Sage Publications vol. 214 (12), 1485-1501.
01-12-2000 Radial basis artificial neural networks for screw insertions classificationLara B Seneviratne LD
Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065). vol. 2
01-01-2000 1999
Use of artificial neural networks for the monitoring of screw insertionsLara B Althoefer K
Proceedings 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No.99CH36289). vol. 1
01-01-1999 Weightless neural network based monitoring of screw fasteningsSeneviratne LD Visuwan P
Proceedings 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No.99CH36289). vol. 1
01-01-1999 Learning in a neuro-fuzzy navigator for robotic manipulatorsAlthoefer K Seneviratne L
ICONIP'99. ANZIIS'99 & ANNES'99 & ACNN'99. 6th International Conference on Neural Information Processing. Proceedings (Cat. No.99EX378). vol. 1
01-01-1999 1998
Modelling conditional probabilities with network committees: how overfitting can be usefulHusmeier D
Neural Network World vol. 8 (4), 417-439.
01-12-1998 Fuzzy Navigation for Robotic ManipulatorsAlthoefer K Seneviratne LD Zavlangas P
International Journal of Uncertainty Fuzziness and Knowledge-Based Systems,
World Scientific Publishing vol. 6 (02), 179-188.
01-04-1998 Automated robot-based screw insertion systemLara B Althoefer K
IECON '98. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society (Cat. No.98CH36200). vol. 4
01-01-1998 Fuzzy PID tuning for robot manipulatorsBekit BW Seneviratne LD Whidborne JF
IECON '98. Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society (Cat. No.98CH36200). vol. 4
01-01-1998 1995
Rapid path planning for robotic manipulators usinganemulated resistive gridAlthöfer K Fraser DA Bugmann G
Electronics Letters,
Institution of Engineering and Technology (Iet) vol. 31 (22), 1960-1961.
26-10-1995 The configuration space transformation for articulated manipulators: a novel approach based on RBF-networksAlthofer K
4th International Conference on Artificial Neural Networks. vol. 1995, 245-249.
01-01-1995 1993
On-line adaptation in robot controlFraser DA Azhar F Althoefer K
IEE Conference Publication. (372), 205-209.
01-01-1993 Tac-Man: Tactile-Informed Prior-Free Manipulation of Articulated ObjectsAlthoefer K Zhao Z Li Y Qi Z Ruan L Zhu Y Li W
IEEE Transactions on Robotics,
Institute of Electrical and Electronics Engineers Corrigendum: Editorial: Advanced motion control and navigation of robots in extreme environmentsMontazeri A Sadeghzadeh-Nokhodberiz N Shojaei K Althoefer K
A Handheld Tool for Temporal and Spatial Young's Modulus Characterization of Soft Materials: Towards Point-of-Care Soft Tissue AssessmentNadipineni S Thaha M Althoefer K Lalitharatne T
In
Research Square Embedding high-resolution touch across robotic hands enables adaptive human-like graspingZhu Y Zhao Z Li W Li Y Liu T Li B Wang M Du K et al.
In
Research Square Salient Features of Soft Tissue Examination Velocity during Manual PalpationKONSTANTINOVA J Althoefer K Dasgupta P Nanayakkar T
Hamlyn Symposium 2013.
Palpation with Controllable Stiffness for Robot-assisted Minimally Invasive SurgerySorkarn N KONSTANTINOVA J Dasgupta P Althoefer K Nanayakkara T
International Conference on Robotics and Automation (ICRA) 2014.
Highly Dexterous 2-module Soft Robot for Intra-organ Navigation in Minimally Invasive SurgeryALTHOEFER KA
The International Journal of Medical Robotics and Computer Assisted Surgery An elastomer-based force and tactile sensorLI W KONSTANTINOVA J Noh Y MA Z ALOMAINY A ALTHOEFER K
2019 2nd IEEE International Conference on Soft Robotics (RoboSoft) Seoul, Korea 14 Apr 2019 - 18 Apr 2019.
Position and Velocity Control for Telemanipulation with Interoperability ProtocolOmarali B Palermo F Valle M Poslad S Althoefer K Farkhatdinov I
20th Towards Autonomous Robotic Systems Conference London 3 May 2019 - 5 Jul 2019.
Implementing Tactile and Proximity Sensing for Crack DetectionPalermo F Konstantinova J Poslad S Althoefer K Farkhatdinov I
IEEE International Conference on Robotics and Automation Paris, Frace 31 May 2020 - 4 Jun 2020.
Highly Manoeuvrable Eversion Robot Based on Fusion of Function with StructureAbrar T Putzu F Rizqi A Godaba H Althoefer K
Ieee icra 2021 Xi’an, China 30 May 2021 - 5 Jun 2021.